

Кинематика и расчет механизма привода автоматических раздвижных дверей гидравлических лифтов - часть 3
Наиболее давнюю историю, вероятно, имеет механизм с тяговым канатом и канатоведущим шкивом (рис.9.19).
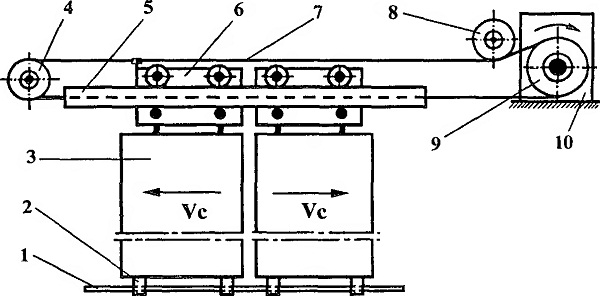
Рис.9,19 Кинематика привода автоматических дверей с тяговым канатом: 1 - направляющая линейка порога; 2 - башмачок створки; 3 - створка; 4 - отклоняющий блок; 5 - линейка направляющая; 6 - каретка; 7 - канат тяговый; 8 - натяжной блок; 9 - канатоведущий шкив(КВШ); 10 -привод КВШ
Создание этой схемы явилось логическим развитием
канатной системы синхронизации движения створок, которая используется и
в настоящее время.
Синхронизирующий канат одновременно используется в качестве тягового и
получает движение от канатоведущего шкива, установленного на выходном
валу редуктора управляемого электропривода.
Наличие фрикционной связи между тяговым канатом и
КВШ делает такую систему более безопасной , чем рассмотренные выше
механизмы.
Створки дверей кабины двигаются во взаимно-противоположных направлениях
благодаря кинематической связи с разными ветвями тягового каната.
Необходимое сцепление тягового каната с КВШ обеспечивается
геометрическими характеристиками его обода и начальным натяжением,
которое создается посредством натяжного отклоняющего блока,
дополнительно увеличивающего угол обхвата шкива.
При достаточном начальном натяжении работа фрикционной передачи усилия
без скольжения каната может быть обеспечена даже при полукруглой канавке
КВШ.
Регулировкой силы начального натяжения тягового каната можно обеспечить
ограничение силы сжатия створок на допустимом безопасном уровне.
На рис. 9.20 представлен винтовой привод автоматических дверей, который
использовался уже в 50-х годах. С появлением микропроцессорных систем
управления приводом масштабы его применения должны заметно увеличиться.
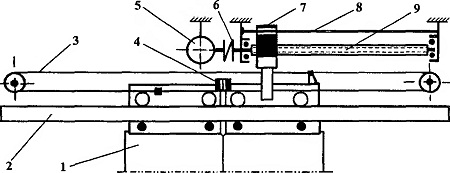
Рис.9.20 Винтовой привод автоматических дверей: I- створка; 2 - линейка; 3 - канат синхронизации движения створок; 4 - контакт контроля притвора дверей штепсельного типа; 5 - электродвигатель с регулируемой частотой вращения вала; 6 - муфта; 7 - гайка с направляющей втулкой; 8 - направляющая; 9 - винт ходовой
Несомненным достоинством такого решения является простота конструкции и
технологичность. Основу механизма составляет электродвигатель,
непосредственно вращающий ходовой винт и гайка, движущаяся по
направляющим и кинематически связанная со створками дверей кабины.
При использовании быстроходного ходового винта приходится считаться с
повышенными требованиями к его динамической уравновешенности с целью
исключения вибраций и шума. Однако все эти вопросы технически вполне
разрешимы.
Наличие жесткой связи со створками требует использования весьма надежной
системы автоматического реверса.
Направляющая 8 уравновешивает реактивный момент гайки, исключая его
передачу на створку дверей.
Работа привода контролируется автоматической системой управления с
датчиком перемещения створки.
Контакты контроля предельных положений створок могут не устанавливаться
при наличии надежной электронной системы управления с датчиком
перемещения.
При применении управляемого привода хорошо зарекомендовал себя механизм,
в котором используются зубчатые ременные передачи.
Несомненным достоинством такого привода автоматических дверей является высокая плавность работы, бесшумность и простота конструкции ( рис. 9.21).
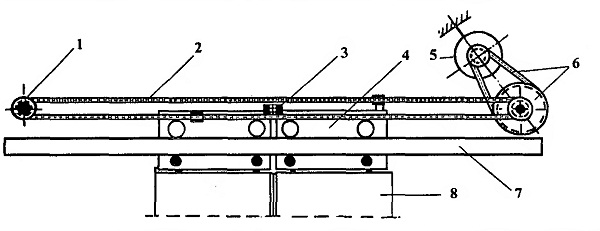
Рис.9.21 Привод автоматических дверей с ременной передачей: 1 - натяжная звездочка; 2 -зубчатый ремень; 3 - штепсельный контакт контроля притвора; 4 - каретка створки; 5 - электродвигатель; 6 - промежуточная ременная передача
Расчет привода автоматических дверей с механическим способом управления диаграммой скорости движения створок производится аналогичным способом с некоторыми особенностями, связанными с нелинейным характером функциональной зависимости скорости створок от частоты вращения вала двигателя.
Содержание
- 1. Гидравлические лифты (Архангельский Г.Г., Бабичев С.Д, Ваксман М.А.) -читать онлайн
- 2. ПРЕДИСЛОВИЕ (Гидравлические лифты)
- 3. История развития конструкции гидравлических лифтов
- 4. История развития конструкции гидравлических лифтов
- 5. История развития конструкции гидравлических лифтов
- 6. История развития конструкции гидравлических лифтов
- 7. История развития конструкции гидравлических лифтов
- 8. Современное состояние, тенденции и перспективы дальнейшегосовершенствования гидравлических лифтов
- 9. Классификация, кинематические схемы и техническая характеристикагидравлических лифтов
- 10. Классификация гидравлических лифтов
- 11. Техническая характеристика гидравлических лифтов
- 12. Общие требования к конструкции и параметрам гидравлических лифтов
- 13. Конструкция и принцип действия гидравлических лифтов и грузовых платформ
- 14. РАБОЧИЕ ЖИДКОСТИ ГИДРОПРИВОДА гидравлических лифтов
- 15. Минеральные масла гидравлических лифтов
- 16. Плотность и удельный вес минеральных масел гидравлических лифтов
- 17. Влияние воды на минеральные масла гидравлических лифтов
- 18. Влияние воздуха на минеральные масла гидравлических лифтов
- 19. Влияние температуры на минеральные масла гидравлических лифтов
- 20. Теплоемкость и теплопроводность рабочей жидкости гидравлических лифтов
- 21. Смазывающая способность и стабильность характеристик рабочей жидкостигидравлических лифтов
- 22. Влияние механических примесей на свойства рабочей жидкости гидравлическихлифтов
- 23. МЕХАНИЗМЫ ПОДЪЕМА С ГИДРОДВИГАТЕЛЯМИ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ
- 24. Канатные и рычажные мультипликаторы механизмов подъема гидравлическихлифтов
- 25. Тяговые органы канатных мультипликаторов гидравлических лифтов
- 26. Тяговые органы канатных мультипликаторов гидравлических лифтов
- 27. Основные характеристики канатного мультипликатора гидравлических лифтов
- 28. Гидроцилиндры механизма подъема гидравлических лифтов
- 29. Одноступенчатые гидроцилиндры гидравлических лифтов
- 30. Одноступенчатые гидроцилиндры гидравлических лифтов
- 31. Одноступенчатые гидроцилиндры гидравлических лифтов
- 32. Одноступенчатые штоки гидравлических лифтов, работающие на сжатие
- 33. Телескопические поршни гидравлических лифтов, работающие на сжатие
- 34. Телескопические поршни с механической синхронизацией нагидравлических лифтах
- 35. Телескопические поршни с гидравлической синхронизацией нагидравлических лифтах
- 36. Определение размеров телескопических поршней гидравлических лифтов
- 37. СИЛОВОЕ ОБОРУДОВАНИЕ ГИДРОПРИВОДА гидравлических лифтов
- 38. Бак для рабочей жидкости гидравлических лифтов
- 39. Бак для рабочей жидкости гидравлических лифтов
- 40. Электродвигатель привода насоса гидравлических лифтов
- 41. Электродвигатель привода насоса гидравлических лифтов
- 42. Насос гидроагрегата гидравлических лифтов
- 43. Насос гидроагрегата гидравлических лифтов
- 44. Шестеренчатые насосы гидравлических лифтов
- 45. Аксиально-поршневые насосы гидравлических лифтов
- 46. Винтовые насосы гидравлических лифтов
- 47. Винтовые насосы гидравлических лифтов
- 48. ВСПОМОГАТЕЛЬНОЕ ОБОРУДОВАНИЕ ГИДРОПРИВОДА гидравлических лифтов
- 49. Трубопровод гидропривода гидравлических лифтов
- 50. Уплотнения гидропривода гидравлических лифтов
- 51. Уплотнения гидропривода гидравлических лифтов
- 52. Фильтры гидропривода гидравлических лифтов
- 53. Фильтры гидропривода гидравлических лифтов
- 54. Антивибраторы и шумоподавители гидропривода гидравлических лифтов
- 55. Антивибраторы и шумоподавители гидропривода гидравлических лифтов
- 56. Теплообменники гидропривода гидравлических лифтов
- 57. Теплообменники гидропривода гидравлических лифтов
- 58. АППАРАТУРА УПРАВЛЕНИЯ ГИДРОПРИВОДА гидравлических лифтов
- 59. Клапаны гидропривода гидравлических лифтов
- 60. Дросселирующие клапаны гидропривода гидравлических лифтов
- 61. Дросселирующие клапаны гидропривода гидравлических лифтов
- 62. Клапаны ограничения давления гидропривода гидравлических лифтов
- 63. Клапаны регулирования потока рабочей жидкости гидропривода гидравлическихлифтов
- 64. Электроклапаны гидропривода гидравлических лифтов
- 65. Пропорциональные электроклапаны гидропривода гидравлических лифтов
- 66. Гидравлические схемы управления гидравлических лифтов
- 67. Простая гидравлическая система, не обеспечивающая точной остановки кабиныгидравлических лифтов
- 68. Гидравлическая система со скоростью выравнивания при спуске -гидравлические лифты
- 69. Лифтовая гидравлическая система с разными клапанами для подъема и спуска
- 70. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 71. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 72. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 73. Гидравлические схемы лифтов с электронной системой управления ипропорциональными клапанами
- 74. Гидролифты - Гидравлическая схема управления с частотным регулированием
- 75. ОСНОВЫ ТЯГОВОГО РАСЧЕТА ГИДРАВЛИЧЕСКОГО ЛИФТА
- 76. Расчет сопротивления движению башмаков кабины по направляющим угидравлических лифтов
- 77. Определение параметров гидроцилиндра гидравлических лифтов
- 78. Определение параметров силового оборудования гидравлических лифтов
- 79. КАБИНЫ ГИДРАВЛИЧЕСКИХ ЛИФТОВ
- 80. Конструкция кабины гидравлических лифтов
- 81. Конструкция кабины гидравлических лифтов
- 82. Устройства контроля загрузки кабины гидравлических лифтов
- 83. Каркас кабины лифта гидравлических лифтов
- 84. Каркас кабины лифта гидравлических лифтов
- 85. Прочностной расчет каркаса кабины гидравлических лифтов
- 86. Гидравлические лифты - расчет каркаса кабины лифта с гидроцилиндромпрямого действия
- 87. ДВЕРИ КАБИНЫ И ШАХТЫ гидравлических лифтов
- 88. Конструкция и работа механизма привода автоматических дверейгидравлических лифтов
- 89. Раздвижные двери кабины гидравлических лифтов
- 90. Раздвижные двери кабины гидравлических лифтов
- 91. Раздвижные двери кабины гидравлических лифтов
- 92. Раздвижные двери кабины гидравлических лифтов
- 93. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 94. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 95. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 96. НАПРАВЛЯЮЩИЕ гидравлических лифтов
- 97. Конструкция и установка направляющих в шахте гидравлических лифтов
- 98. Конструкция и установка направляющих в шахте гидравлических лифтов
- 99. Конструкция и установка направляющих в шахте гидравлических лифтов
- 100. Расчет направляющих гидравлических лифтов
- 101. Гидравлические лифты - Методика расчета направляющих на прочность ижесткость
- 102. ЗАЩИТНЫЕ УСТРОЙСТВА гидравлических лифтов
- 103. Механические защитные устройства гидравлических лифтов
- 104. Ловители гидравлических лифтов
- 105. Улавливающие устройства ловителей гидравлических лифтов, их основныехарактеристики
- 106. Конструкция и принцип действия ловителей гидравлических лифтов
- 107. Ловители плавного торможения гидравлических лифтов
- 108. Расчет ловителей гидравлических лифтов
- 109. Механизмы привода ловителей гидравлических лифтов
- 110. Проверка работоспособности механизма включения ловителей гидравлическихлифтов
- 111. Ограничители скорости гидравлических лифтов
- 112. Конструкция и расчет ограничителей скорости гидравлических лифтов
- 113. Гидравлические лифты - конструкция и расчет ограничителя скорости синерционным роликом
- 114. Упоры и буферы гидравлических лифтов
- 115. Конструкция и расчет пружинного буфера гидравлических лифтов
- 116. Конструкция и расчет гидравлического буфера гидравлических лифтов
- 117. Гидравлические устройства предотвращения падения кабины лифта
- 118. Гидромеханическое устройство стопорения поршня гидравлических лифтов
- 119. Устройства защиты от медленного спуска кабины гидравлических лифтов
- 120. Применение ловителей для предотвращения медленного спуска кабиныгидравлических лифтов
- 121. Стопорные устройства защиты от медленного спуска кабины гидравлическихлифтов
- 122. Аварийные устройства эвакуации пассажиров из кабины гидравлических лифтов
- 123. Клапан ручного действия для спуска кабины гидравлических лифтов
- 124. ЭЛЕКТРОАППАРАТУРА гидравлических лифтов
- 125. Электрическая цепь пуска гидравлических лифтов
- 126. Электрическая цепь управления гидравлических лифтов
- 127. Гидравлические лифты - цепь управления с выравниванием при закрытыхдверях во время спуска и с автовыравниванием при открытых дверях
- 128. Гидравлические лифты - схема управления с выравниванием при закрытыхдверях
- 129. ШАХТЫ И МАШИННЫЕ ПОМЕЩЕНИЯ гидравлических лифтов
- 130. Шахты гидравлических лифтов
- 131. Собственно шахта гидравлических лифтов
- 132. Приямок гидравлических лифтов
- 133. Верхняя часть шахты гидравлических лифтов
- 134. Машинные помещения гидравлических лифтов
- 135. ЛИТЕРАТУРА (Гидравлические лифты)
- 136. ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ЭЛЕМЕНТОВ ОБЪЕМНОГО ГИДРОПРИВОДА ЛИФТОВОТЕЧЕСТВЕННОГО ПРОИЗВОДСТВА
- 137. ОГЛАВЛЕНИЕ - Гидравлические лифты (Архангельский Г.Г.)

от 1030.00 руб./шт.

от 224.00 руб./шт.

от 195.00 руб./шт.

от 195.00 руб./шт.

от 402.00 руб./шт.

от 402.00 руб./шт.

от 288.00 руб./шт.

от 288.00 руб./шт.

от 288.00 руб./шт.

от 56.00 руб./шт.

от 224.00 руб./шт.

от 138.00 руб./шт.