





6.2.5.
Гидролифты - Гидравлическая схема управления с частотным регулированием
На международной выставке “Интерлифт 97 ” в Аугсбурге впервые
представлен “гидравлический привод лифта с частотным регулированием”.
Стимулом к созданию подобной системы послужил успешный опыт применения
привода переменного тока с частотным регулированием в лифтовых лебедках
и системах автоматических раздвижных дверей.
Кроме того, назрела необходимость в замене крайне неэкономичного
принципа дроссельного регулирования скорости, который явно отстает от
современных цифровых
электронных систем управления лифтов, отличается
большим количеством регулировок и повышенной трудоемкостью технического
обслуживания.
В гидравлической схеме с частотным регулированием значительно снижена
доля участия процесса дросселирования в обеспечении графика движения
кабины как при подъеме, так и при опускании. Это достигается не только
программным изменением скорости вращения вала насоса, но и активной
работой привода в режиме опускания кабины, когда ее скорость
определяется производительностью откачки жидкости из гидроцилиндра
управляемым насосом.
Появляется возможность использования энергии потока жидкости, выходящей
из гидроцилиндра для преобразования ее в электрическую.
Использование электронной системы автоматического регулирования скорости
с датчиком контроля расхода жидкости, наряду с применением
реверсируемого и частотно регулируемого привода насоса позволяет
программно обеспечивать необходимый график движения, независимо от
изменения вязкости, температуры жидкости и загрузки кабины (рис. 6.23.).
Принципиально новым в рассматриваемой системе управления является
наличие реверсивного клапана (Beringer inverter valve) 5, цифрового
электронного блока управления 19 и управляемого цифровой электроникой
блока частотного преобразователя 17 [б].
Станция управления лифта 18 и датчик расхода рабочей жидкости 3 имеют
типовую конструкцию (рис.6.21, 6.22).
Рассмотрим работу гидравлической системы с частотным регулированием в
режиме подъема и спуска кабины.
Скорость движения кабины при подъеме и спуске контролируется посредством
цифрового электронного блока 19, который также контролирует работу
датчика расхода жидкости 3 и блок частотного преобразователя 17.
Датчик 3 выдает сигнал пропорциональный скорости движения кабины.
В свою очередь, цифровой блок работает под управляющим воздействием
станции управления 18 и установленных в шахте датчиков замедления и
остановки кабины 1.
Цифровой блок управления 19 программируется посредством специальной
панели установки параметров графика движения или с помощью программы,
работающей под операционной системой MS-Windows.
Работа гидравлической системы управления при движении кабины на подъем.
При поступлении команды на подъем кабины станция управления 18
посредством блоков 19, 17 и 14 включает двигатель 12, который, в
соответствии с заданной программой, начинает медленно набирать обороты.
Давление между выходом насоса и реверсивным клапаном 5 увеличивается.
Управляющий обратный клапан 4 открывается, как только давление в
напорной линии достигнет установленного значения. Клапан избыточного
давления 8 сбрасывает рабочую жидкость на слив только при недопустимом
уровне превышения давления.
Цифровой блок 19 посредством датчика 3 непрерывно контролирует скорость
движения кабины и меняет ее в соответствии с запрограммированным
графиком движения.
При подходе к этажу срабатывает датчик замедления и блок 19 плавно
изменяет скорость кабины до скорости выравнивания.
При воздействии кабины на датчик остановки происходит ее остановка на
уровне этажной площадки. Так как скорость выравнивания очень мала,
обеспечивается высокая точность остановки.
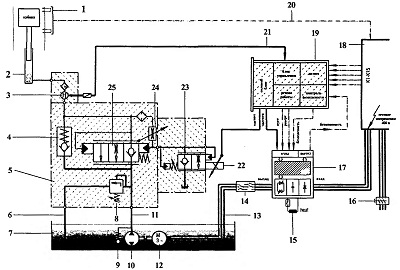
Рис.6.23 Гидравлическая система с частотным регулированием SATURN a Beringer: 1 - датчики замедления и остановки кабины; 2 - гидроцилиндр подъема кабины; 3 - датчик расхода жидкости; 4 - обратный клапан; 5 - реверсивный клапан управления Beringer; 6 - линия слива жидкости; 7 - бак гидроагрегата; 8 - клапан избыточного давления; 9 - обратный клапан заливки насоса; 10 - насос с реверсивным потоком; II - напорная линия; 12 - электродвигатель с частотным управлением; 13 - трехфазная сеть переменного тока управляемой частоты; 14 - главный контактор цепи питания и реверса двигателя; 15 - резистор; 16 - автомат защиты силовой сети; 17 - блок частотного преобразователя; 18 - станция управления; 19 - цифровой электронный блок программного управления; 20 - цепь датчиков замедления и остановки; 21 - кабель датчика расхода жидкости; 22 - электромагнит пропорционального электроклапана; 23 - пропорциональный электроклапан; 24 - регулируемый дроссель; 25 - управляющий клапан
В режиме подъема элементы 22, 23, 24, 25 в работе
не участвуют. На всем пути движения кабины, от момента пуска до
остановки, формирование графика движения обеспечивается управляемым
приводом насоса по заданной программе.
Работа гидравлической системы управления при спуске кабины.
При поступлении команды на спуск кабины в работу вступает реверсивный
клапан 5.
Цифровой блок 19 подает питание на электромагнит 22 пропорционального
клапана 23, который открывает клапан управления потоком 25.
Одновременно с этим запускается двигатель насоса на вращение в сторону,
противоположную вращению при подъеме.
Система управления устанавливает малые обороты вала двигателя.
Для лучшего заполнения насоса рабочей жидкостью в момент запуска
используется обратный клапан 9.
При достижении установленной программой скорости кабины,
пропорциональный клапан 23 полностью открывает клапан 25.
С этого момента управление скоростью кабины идет за счет регулирования
скорости вращения вала насоса с помощью блока частотного преобразователя
17 и цифрового блока 19.
Насос начинает работать как гидродвигатель и, вращая вал электромотора,
преобразует энергию потока рабочей жидкости из гидроцилиндра в
электрическую энергию, поступающую в частотный преобразователь 17.
Величина получаемой при спуске кабины электрической энергии зависит от
КПД насоса и электродвигателя.
С помощью резистора 15 вырабатываемая электрическая энергия
преобразуется в тепловую.
При большой мощности привода эта электрическая энергия может
направляться в специальный аккумулятор.
Во время работы насоса в режиме гидродвигателя до подхода кабины к
этажу, блок 19 включает магнит пропорционального клапана 23, который
полностью блокирует работу управляющего клапана 25. Управляемый дроссель
24 используется для настройки работы пропорционального клапана 23,
необходимой для воздействие на клапан 25.
При подходе к этажу срабатывает датчик замедления и дальнейший ход
графика движения определяется работой пропорционального клапана 23,
управляющего клапана 25 под действием сигнала, поступающего от цифрового
блока управления 19 с учетом уровня сигнала от датчика расхода(скорости
кабины) 3.
В период замедления до момента срабатывания датчика остановки работа
привода насоса полностью блокируется.
Работа блока частотного преобразователя при подъеме и на большей части
пути опускания кабины осуществляется путем программно изменяемого
управляющего постоянного напряжения, генерируемого цифровым блоком 19 и
управляющего работой блока 17.
Изменению управляющего напряжения от 0 до 10 В соответствует изменение
частоты трехфазного переменного тока в диапазоне от 0 до 100 Гц.
Диаграммы изменения скорости кабины лифта при подъеме и опускании
приведены на рис. 6.24.
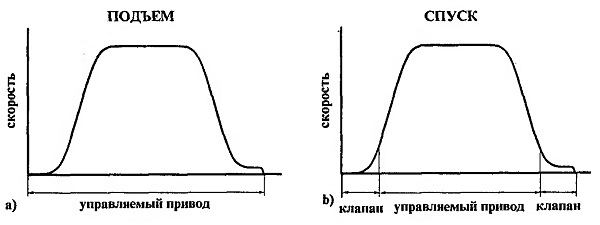
Рис.6.24 Диаграмма изменении скорости кабины лифта при работе гидропривода с частотным регулированием: а - подъем; b - спуск
Диаграмма, представленная на рис.6.24 а
иллюстрирует характер изменения скорости при подъеме кабины под
действием частотно регулируемого привода насоса.
При опускании кабины аналогичный характер диаграммы скорости
обеспечивается работой реверсивного клапана и управляемого привода
насоса. Период работы реверсивного клапана соответствует участку
плавного разгона и замедления опускающейся кабины.
Опыт эксплуатации показал, что применение гидравлической системы с
частотным регулированием и реверсивным клапаном значительно улучшает
эксплуатационные характеристики лифта, обеспечивает снижение пусковых
токов, уровня шума. Обеспечивает независимость времени движения, разгона
и точности остановки от загрузки кабины.
Система с частотным регулированием отличается простотой конструкции,
малым количеством регулировок и простотой технического обслуживания.
Применение подобной системы способствует повышению конкурентоспособности
гидравлических лифтов на мировом рынке лифтовой продукции.
В таб.6.1 приведены технические параметры лифтов с системой частотного
регулирования фирмы Beringer.
Таблица 6.1 Параметры гидравлических лифтов с системой SATURN а
Т ип лифта
Груз
кГ
Кабина
кГ
Высота
м
Ско
рость
м/с
Мощ
ность
кВт
Насос
л/мин
Плунжер D, мм
Saturn а200
630
700
17
1
20
235
110
Saturn а 350
1000
1500
20
1
33
400
125
Saturn а 500
1500
2000
20
1
47
480
140
Приведенные в таблицы лифты оборудованы двухкратным канатным мультипликатором и расчитаны на питание от силовой трехфазной сети напряжением 400 В / 50 Гц.
В конструкции гидравлических грузовых платформ с
рычажным мультипликатором применяются системы управления, в значительной
мере аналогичные рассмотренным выше.
Степень сложности гидравлических систем управления и конструкция
гидроагрегата грузовых платформ определяется назначением, требованиями к
точности остановки и плавности хода в переходных режимах.
Соответствующая гидроаппаратура размещается на опорной раме и
соединяется с гидроцилиндром посредством гибких шлангов.
Управление работой грузовой платформы производится посредством выносного
пульта с кнопочной системой приказов.
Вся приведенная выше информация по гидрооборудованию лифтов в равной
мере справедлива для гидравлических грузовых платформ различного
назначения.
Содержание
- 1. Гидравлические лифты (Архангельский Г.Г., Бабичев С.Д, Ваксман М.А.) -читать онлайн
- 2. ПРЕДИСЛОВИЕ (Гидравлические лифты)
- 3. История развития конструкции гидравлических лифтов
- 4. История развития конструкции гидравлических лифтов
- 5. История развития конструкции гидравлических лифтов
- 6. История развития конструкции гидравлических лифтов
- 7. История развития конструкции гидравлических лифтов
- 8. Современное состояние, тенденции и перспективы дальнейшегосовершенствования гидравлических лифтов
- 9. Классификация, кинематические схемы и техническая характеристикагидравлических лифтов
- 10. Классификация гидравлических лифтов
- 11. Техническая характеристика гидравлических лифтов
- 12. Общие требования к конструкции и параметрам гидравлических лифтов
- 13. Конструкция и принцип действия гидравлических лифтов и грузовых платформ
- 14. РАБОЧИЕ ЖИДКОСТИ ГИДРОПРИВОДА гидравлических лифтов
- 15. Минеральные масла гидравлических лифтов
- 16. Плотность и удельный вес минеральных масел гидравлических лифтов
- 17. Влияние воды на минеральные масла гидравлических лифтов
- 18. Влияние воздуха на минеральные масла гидравлических лифтов
- 19. Влияние температуры на минеральные масла гидравлических лифтов
- 20. Теплоемкость и теплопроводность рабочей жидкости гидравлических лифтов
- 21. Смазывающая способность и стабильность характеристик рабочей жидкостигидравлических лифтов
- 22. Влияние механических примесей на свойства рабочей жидкости гидравлическихлифтов
- 23. МЕХАНИЗМЫ ПОДЪЕМА С ГИДРОДВИГАТЕЛЯМИ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ
- 24. Канатные и рычажные мультипликаторы механизмов подъема гидравлическихлифтов
- 25. Тяговые органы канатных мультипликаторов гидравлических лифтов
- 26. Тяговые органы канатных мультипликаторов гидравлических лифтов
- 27. Основные характеристики канатного мультипликатора гидравлических лифтов
- 28. Гидроцилиндры механизма подъема гидравлических лифтов
- 29. Одноступенчатые гидроцилиндры гидравлических лифтов
- 30. Одноступенчатые гидроцилиндры гидравлических лифтов
- 31. Одноступенчатые гидроцилиндры гидравлических лифтов
- 32. Одноступенчатые штоки гидравлических лифтов, работающие на сжатие
- 33. Телескопические поршни гидравлических лифтов, работающие на сжатие
- 34. Телескопические поршни с механической синхронизацией нагидравлических лифтах
- 35. Телескопические поршни с гидравлической синхронизацией нагидравлических лифтах
- 36. Определение размеров телескопических поршней гидравлических лифтов
- 37. СИЛОВОЕ ОБОРУДОВАНИЕ ГИДРОПРИВОДА гидравлических лифтов
- 38. Бак для рабочей жидкости гидравлических лифтов
- 39. Бак для рабочей жидкости гидравлических лифтов
- 40. Электродвигатель привода насоса гидравлических лифтов
- 41. Электродвигатель привода насоса гидравлических лифтов
- 42. Насос гидроагрегата гидравлических лифтов
- 43. Насос гидроагрегата гидравлических лифтов
- 44. Шестеренчатые насосы гидравлических лифтов
- 45. Аксиально-поршневые насосы гидравлических лифтов
- 46. Винтовые насосы гидравлических лифтов
- 47. Винтовые насосы гидравлических лифтов
- 48. ВСПОМОГАТЕЛЬНОЕ ОБОРУДОВАНИЕ ГИДРОПРИВОДА гидравлических лифтов
- 49. Трубопровод гидропривода гидравлических лифтов
- 50. Уплотнения гидропривода гидравлических лифтов
- 51. Уплотнения гидропривода гидравлических лифтов
- 52. Фильтры гидропривода гидравлических лифтов
- 53. Фильтры гидропривода гидравлических лифтов
- 54. Антивибраторы и шумоподавители гидропривода гидравлических лифтов
- 55. Антивибраторы и шумоподавители гидропривода гидравлических лифтов
- 56. Теплообменники гидропривода гидравлических лифтов
- 57. Теплообменники гидропривода гидравлических лифтов
- 58. АППАРАТУРА УПРАВЛЕНИЯ ГИДРОПРИВОДА гидравлических лифтов
- 59. Клапаны гидропривода гидравлических лифтов
- 60. Дросселирующие клапаны гидропривода гидравлических лифтов
- 61. Дросселирующие клапаны гидропривода гидравлических лифтов
- 62. Клапаны ограничения давления гидропривода гидравлических лифтов
- 63. Клапаны регулирования потока рабочей жидкости гидропривода гидравлическихлифтов
- 64. Электроклапаны гидропривода гидравлических лифтов
- 65. Пропорциональные электроклапаны гидропривода гидравлических лифтов
- 66. Гидравлические схемы управления гидравлических лифтов
- 67. Простая гидравлическая система, не обеспечивающая точной остановки кабиныгидравлических лифтов
- 68. Гидравлическая система со скоростью выравнивания при спуске -гидравлические лифты
- 69. Лифтовая гидравлическая система с разными клапанами для подъема и спуска
- 70. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 71. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 72. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 73. Гидравлические схемы лифтов с электронной системой управления ипропорциональными клапанами
- 74. Гидролифты - Гидравлическая схема управления с частотным регулированием
- 75. ОСНОВЫ ТЯГОВОГО РАСЧЕТА ГИДРАВЛИЧЕСКОГО ЛИФТА
- 76. Расчет сопротивления движению башмаков кабины по направляющим угидравлических лифтов
- 77. Определение параметров гидроцилиндра гидравлических лифтов
- 78. Определение параметров силового оборудования гидравлических лифтов
- 79. КАБИНЫ ГИДРАВЛИЧЕСКИХ ЛИФТОВ
- 80. Конструкция кабины гидравлических лифтов
- 81. Конструкция кабины гидравлических лифтов
- 82. Устройства контроля загрузки кабины гидравлических лифтов
- 83. Каркас кабины лифта гидравлических лифтов
- 84. Каркас кабины лифта гидравлических лифтов
- 85. Прочностной расчет каркаса кабины гидравлических лифтов
- 86. Гидравлические лифты - расчет каркаса кабины лифта с гидроцилиндромпрямого действия
- 87. ДВЕРИ КАБИНЫ И ШАХТЫ гидравлических лифтов
- 88. Конструкция и работа механизма привода автоматических дверейгидравлических лифтов
- 89. Раздвижные двери кабины гидравлических лифтов
- 90. Раздвижные двери кабины гидравлических лифтов
- 91. Раздвижные двери кабины гидравлических лифтов
- 92. Раздвижные двери кабины гидравлических лифтов
- 93. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 94. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 95. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 96. НАПРАВЛЯЮЩИЕ гидравлических лифтов
- 97. Конструкция и установка направляющих в шахте гидравлических лифтов
- 98. Конструкция и установка направляющих в шахте гидравлических лифтов
- 99. Конструкция и установка направляющих в шахте гидравлических лифтов
- 100. Расчет направляющих гидравлических лифтов
- 101. Гидравлические лифты - Методика расчета направляющих на прочность ижесткость
- 102. ЗАЩИТНЫЕ УСТРОЙСТВА гидравлических лифтов
- 103. Механические защитные устройства гидравлических лифтов
- 104. Ловители гидравлических лифтов
- 105. Улавливающие устройства ловителей гидравлических лифтов, их основныехарактеристики
- 106. Конструкция и принцип действия ловителей гидравлических лифтов
- 107. Ловители плавного торможения гидравлических лифтов
- 108. Расчет ловителей гидравлических лифтов
- 109. Механизмы привода ловителей гидравлических лифтов
- 110. Проверка работоспособности механизма включения ловителей гидравлическихлифтов
- 111. Ограничители скорости гидравлических лифтов
- 112. Конструкция и расчет ограничителей скорости гидравлических лифтов
- 113. Гидравлические лифты - конструкция и расчет ограничителя скорости синерционным роликом
- 114. Упоры и буферы гидравлических лифтов
- 115. Конструкция и расчет пружинного буфера гидравлических лифтов
- 116. Конструкция и расчет гидравлического буфера гидравлических лифтов
- 117. Гидравлические устройства предотвращения падения кабины лифта
- 118. Гидромеханическое устройство стопорения поршня гидравлических лифтов
- 119. Устройства защиты от медленного спуска кабины гидравлических лифтов
- 120. Применение ловителей для предотвращения медленного спуска кабиныгидравлических лифтов
- 121. Стопорные устройства защиты от медленного спуска кабины гидравлическихлифтов
- 122. Аварийные устройства эвакуации пассажиров из кабины гидравлических лифтов
- 123. Клапан ручного действия для спуска кабины гидравлических лифтов
- 124. ЭЛЕКТРОАППАРАТУРА гидравлических лифтов
- 125. Электрическая цепь пуска гидравлических лифтов
- 126. Электрическая цепь управления гидравлических лифтов
- 127. Гидравлические лифты - цепь управления с выравниванием при закрытыхдверях во время спуска и с автовыравниванием при открытых дверях
- 128. Гидравлические лифты - схема управления с выравниванием при закрытыхдверях
- 129. ШАХТЫ И МАШИННЫЕ ПОМЕЩЕНИЯ гидравлических лифтов
- 130. Шахты гидравлических лифтов
- 131. Собственно шахта гидравлических лифтов
- 132. Приямок гидравлических лифтов
- 133. Верхняя часть шахты гидравлических лифтов
- 134. Машинные помещения гидравлических лифтов
- 135. ЛИТЕРАТУРА (Гидравлические лифты)
- 136. ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ЭЛЕМЕНТОВ ОБЪЕМНОГО ГИДРОПРИВОДА ЛИФТОВОТЕЧЕСТВЕННОГО ПРОИЗВОДСТВА
- 137. ОГЛАВЛЕНИЕ - Гидравлические лифты (Архангельский Г.Г.)

от 890.00 руб./шт.

от 185.00 руб./шт.

от 132.00 руб./шт.

от 103.00 руб./шт.

от 391.00 руб./шт.

от 17 518.00 руб./шт.

от 17 518.00 руб./шт.

от 17 518.00 руб./шт.

от 2559.00 руб./шт.

от 1578.00 руб./шт.

от 890.00 руб./шт.