





6.2.4.
Гидравлические схемы лифтов с электронной системой управления и пропорциональными клапанами
В целях улучшения эксплуатационных качеств гидравлического лифта, чтобы
сделать его более конкурентоспособным по сравнению с лифтом с
электрическим приводом, и добиться уменьшения расхода энергии и
увеличения средней скорости лифта, в настоящее время среди изготовителей
гидравлических лифтов, как и в других областях, имеется тенденция к
использованию преимуществ, предоставляемых сочетанием гидродинамики (с
масляной средой) и электроники.
И действительно, с помощью электронных средств можно программировать
рабочую скорость в зависимости от характеристик установки, придавать
наиболее подходящие значения ускорению и замедлению при подъеме и при
спуске, с помощью датчиков контролировать соблюдение этих значений и при
необходимости выполнять корректировки.
Другими словами, электроника позволяет использовать замкнутую систему регулировки (Рис. 6.20), в которой электронный регулятор сравнивает входной сигнал, соответствующий желаемому значению для переменной на выходе, с сигналом обратной связи и изменяет свой выход, минимизируя или аннулируя ошибку.

Рис.6.20 Схема электронной регулировки скорости штока гидроцилиндра: Vr - электрическое напряжение, соответствующее требуемой величине установившейся скорости, получаемое с выхода электронного блока программирования; Is - выходной ток, пропорциональный входному напряжению; Q - расход рабочей жидкости с выхода пропорционального клапана с управляющим электромагнитом; Vu - фактическое значение скорости перемещения штока гидроцилиндра; Vt -напряжение выходного сигнала датчика скорости; Р - рабочее усилие штока гидроцилиндра; е -напряжение ошибки регулирования скорости
Таким образом, и в гидравлических лифтах возможна
система управления и регулировки, очень похожая на системы, применяемые
в электрических лифтах с приводом постоянного тока или с
частотно-регулируемым приводом переменного трехфазного тока.
Не вдаваясь в подробности, скажем только, что в качестве датчиков
используются тахоГенераторы постоянного тока, которые устанавливаются
непосредственно на кабине и позволяют измерять мгновенную скорость, или
измерители расхода потока жидкости (Рис. 6.21), которые устанавливаются
в подающем трубопроводе и могут измерять количество поступающей в
цилиндр жидкости.
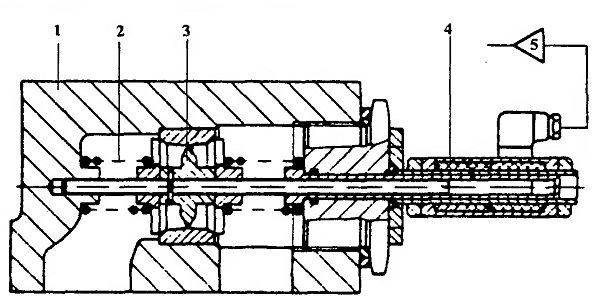
Рис,6.21. Датчик величины расхода рабочей жидкости: 1 корпус; 2 - пружина; 3 - диск, воспринимающий скоростной напор потока жидкости; 4 - дифференциальный индуктивный датчик перемещения
Датчик может измерять расход жидкости при прямом и
обратном направлении потока.
Принцип работы датчика основан на измерении перемещения, зажатого между
симметрично расположенными пружинами 2 диска 3, который смещается в
продольном
направлении под действием скоростного напора
потока, который определяется количеством жидкости, проходящей по трубе в
единицу времени(расходу). Величина продольного смещения диска измеряется
датчиком 4 и соответствующей электронной схемой.
Электрический сигнал обратной связи, полученный с помощью тахогенератора
постоянного тока или измерителя производительности, постоянно
сравнивается электронным регулятором с заранее установленным значением
контролируемой величины скорости(ускорения или замедления). Выходной
сигнал блока электронного регулятора подается на один или несколько
пропорциональных клапанов, которые служат для управления клапанами
подъема и спуска кабины.
На рис.6.22, в качестве примера реализации системы электронного
управления приведена схема типа LRV-1 швейцарской фирмы Beringer.
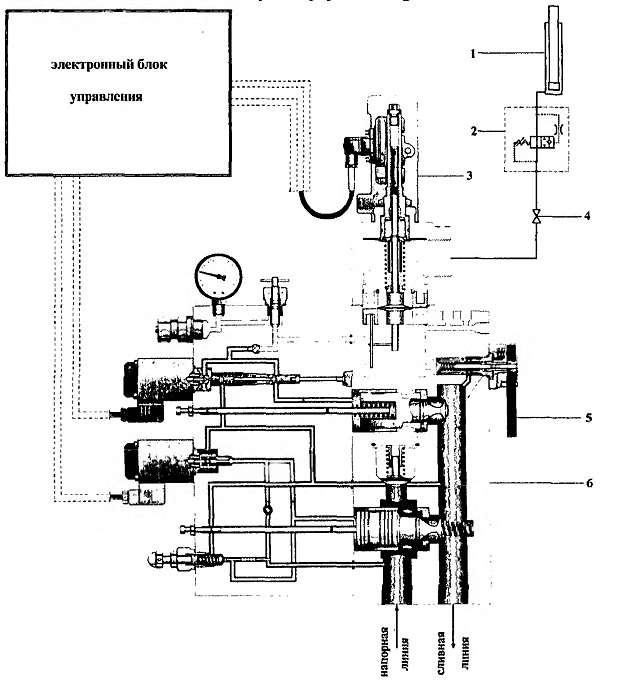
Рис. 6.22. Гидравлическая схема с электронным управлением типа LRV-1: 1 - гидроцилиндр; 2 - клапан аварийного спуска кабины; 3 - датчик расхода жидкости; 4 - кран; 5 - рычаг управления клапаном ручного спуска кабины; 6 - блок клапанов с пропорциональным электронным управлением
Первые клапаны с электронным управлением для
гидравлических лифтов были разработаны специалистами этой фирмы более 25
лет назад. Благодаря многочисленным усовершенствованиям на основе
использования цифровой электроники удалось создать высококачественные
схемы управления приемлемой стоимости.
Основу конструкции системы управления LRV-1 составляет блок клапанов 6 с
датчиком расхода рабочей жидкости 3 и электронный блок, обеспечивающий
рациональный график движения кабины при разгоне и замедлении, при
подъеме и спуске.
Благодаря наличию обратной связи по скорости достигается программное
обеспечение заданного графика изменения скорости и минимизируется путь
выравнивания положения кабины.
В контуре автоматического регулирования используется сигнал датчика
расхода 3, поступающий в электронный блок управления.
Насос приводится в действие асинхронным короткозамкнутым двигателем
переменного трехфазного тока, который работает только при подъеме
кабины. Пуск двигателя производится практически в холостом режиме
благодаря сливу рабочей жидкости в процессе пуска.
График движения с допустимым уровнем ускорений и высокой точностью
остановки обеспечивается благодаря электронному регулированию работы
пропорциональных электрических клапанов блока 6.
В схеме управления предусмотрен клапан аварийного спуска 2 и
вспомогательный кран 4. Имеется система ручного управления спуска
кабины, которая приводится в действие рычагом 5.
Фирма Beringer утверждает, что благодаря использованию системы LRV-1 ей
удалось добиться независимости параметров графика движения от давления,
температуры и вязкости рабочей жидкости. Уменьшились потери мощности и
снизились энергетические затраты. Удалось увеличить скорость опускания
кабины на 50 % без увеличения стоимости оборудования и снижения
комфортности условий перевозки пассажиров.
Работа специалистов фирмы Beringer по дальнейшему совершенствованию
эксплуатационных характеристик гидравлических лифтов привела к созданию
принципиально новой конструкции гидравлической системы управления на
основе использования частотно регулируемого реверсируемого
электропривода насоса.
К аналогичному решению пришла немецкая фирма применительно к конструкции
гидравлического лифта с противовесом и цилиндром двойного действия(
Leistritz). Она организовала выпуск гидравлических лифтов с частотным
регулированием с грузо-подъемномтью 450, 630 и 1000 кГ при скорости
движения кабины от 0,5 до 1 м/с при высоте подъема 12 и 20 м.
Содержание
- 1. Гидравлические лифты (Архангельский Г.Г., Бабичев С.Д, Ваксман М.А.) -читать онлайн
- 2. ПРЕДИСЛОВИЕ (Гидравлические лифты)
- 3. История развития конструкции гидравлических лифтов
- 4. История развития конструкции гидравлических лифтов
- 5. История развития конструкции гидравлических лифтов
- 6. История развития конструкции гидравлических лифтов
- 7. История развития конструкции гидравлических лифтов
- 8. Современное состояние, тенденции и перспективы дальнейшегосовершенствования гидравлических лифтов
- 9. Классификация, кинематические схемы и техническая характеристикагидравлических лифтов
- 10. Классификация гидравлических лифтов
- 11. Техническая характеристика гидравлических лифтов
- 12. Общие требования к конструкции и параметрам гидравлических лифтов
- 13. Конструкция и принцип действия гидравлических лифтов и грузовых платформ
- 14. РАБОЧИЕ ЖИДКОСТИ ГИДРОПРИВОДА гидравлических лифтов
- 15. Минеральные масла гидравлических лифтов
- 16. Плотность и удельный вес минеральных масел гидравлических лифтов
- 17. Влияние воды на минеральные масла гидравлических лифтов
- 18. Влияние воздуха на минеральные масла гидравлических лифтов
- 19. Влияние температуры на минеральные масла гидравлических лифтов
- 20. Теплоемкость и теплопроводность рабочей жидкости гидравлических лифтов
- 21. Смазывающая способность и стабильность характеристик рабочей жидкостигидравлических лифтов
- 22. Влияние механических примесей на свойства рабочей жидкости гидравлическихлифтов
- 23. МЕХАНИЗМЫ ПОДЪЕМА С ГИДРОДВИГАТЕЛЯМИ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ
- 24. Канатные и рычажные мультипликаторы механизмов подъема гидравлическихлифтов
- 25. Тяговые органы канатных мультипликаторов гидравлических лифтов
- 26. Тяговые органы канатных мультипликаторов гидравлических лифтов
- 27. Основные характеристики канатного мультипликатора гидравлических лифтов
- 28. Гидроцилиндры механизма подъема гидравлических лифтов
- 29. Одноступенчатые гидроцилиндры гидравлических лифтов
- 30. Одноступенчатые гидроцилиндры гидравлических лифтов
- 31. Одноступенчатые гидроцилиндры гидравлических лифтов
- 32. Одноступенчатые штоки гидравлических лифтов, работающие на сжатие
- 33. Телескопические поршни гидравлических лифтов, работающие на сжатие
- 34. Телескопические поршни с механической синхронизацией нагидравлических лифтах
- 35. Телескопические поршни с гидравлической синхронизацией нагидравлических лифтах
- 36. Определение размеров телескопических поршней гидравлических лифтов
- 37. СИЛОВОЕ ОБОРУДОВАНИЕ ГИДРОПРИВОДА гидравлических лифтов
- 38. Бак для рабочей жидкости гидравлических лифтов
- 39. Бак для рабочей жидкости гидравлических лифтов
- 40. Электродвигатель привода насоса гидравлических лифтов
- 41. Электродвигатель привода насоса гидравлических лифтов
- 42. Насос гидроагрегата гидравлических лифтов
- 43. Насос гидроагрегата гидравлических лифтов
- 44. Шестеренчатые насосы гидравлических лифтов
- 45. Аксиально-поршневые насосы гидравлических лифтов
- 46. Винтовые насосы гидравлических лифтов
- 47. Винтовые насосы гидравлических лифтов
- 48. ВСПОМОГАТЕЛЬНОЕ ОБОРУДОВАНИЕ ГИДРОПРИВОДА гидравлических лифтов
- 49. Трубопровод гидропривода гидравлических лифтов
- 50. Уплотнения гидропривода гидравлических лифтов
- 51. Уплотнения гидропривода гидравлических лифтов
- 52. Фильтры гидропривода гидравлических лифтов
- 53. Фильтры гидропривода гидравлических лифтов
- 54. Антивибраторы и шумоподавители гидропривода гидравлических лифтов
- 55. Антивибраторы и шумоподавители гидропривода гидравлических лифтов
- 56. Теплообменники гидропривода гидравлических лифтов
- 57. Теплообменники гидропривода гидравлических лифтов
- 58. АППАРАТУРА УПРАВЛЕНИЯ ГИДРОПРИВОДА гидравлических лифтов
- 59. Клапаны гидропривода гидравлических лифтов
- 60. Дросселирующие клапаны гидропривода гидравлических лифтов
- 61. Дросселирующие клапаны гидропривода гидравлических лифтов
- 62. Клапаны ограничения давления гидропривода гидравлических лифтов
- 63. Клапаны регулирования потока рабочей жидкости гидропривода гидравлическихлифтов
- 64. Электроклапаны гидропривода гидравлических лифтов
- 65. Пропорциональные электроклапаны гидропривода гидравлических лифтов
- 66. Гидравлические схемы управления гидравлических лифтов
- 67. Простая гидравлическая система, не обеспечивающая точной остановки кабиныгидравлических лифтов
- 68. Гидравлическая система со скоростью выравнивания при спуске -гидравлические лифты
- 69. Лифтовая гидравлическая система с разными клапанами для подъема и спуска
- 70. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 71. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 72. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 73. Гидравлические схемы лифтов с электронной системой управления ипропорциональными клапанами
- 74. Гидролифты - Гидравлическая схема управления с частотным регулированием
- 75. ОСНОВЫ ТЯГОВОГО РАСЧЕТА ГИДРАВЛИЧЕСКОГО ЛИФТА
- 76. Расчет сопротивления движению башмаков кабины по направляющим угидравлических лифтов
- 77. Определение параметров гидроцилиндра гидравлических лифтов
- 78. Определение параметров силового оборудования гидравлических лифтов
- 79. КАБИНЫ ГИДРАВЛИЧЕСКИХ ЛИФТОВ
- 80. Конструкция кабины гидравлических лифтов
- 81. Конструкция кабины гидравлических лифтов
- 82. Устройства контроля загрузки кабины гидравлических лифтов
- 83. Каркас кабины лифта гидравлических лифтов
- 84. Каркас кабины лифта гидравлических лифтов
- 85. Прочностной расчет каркаса кабины гидравлических лифтов
- 86. Гидравлические лифты - расчет каркаса кабины лифта с гидроцилиндромпрямого действия
- 87. ДВЕРИ КАБИНЫ И ШАХТЫ гидравлических лифтов
- 88. Конструкция и работа механизма привода автоматических дверейгидравлических лифтов
- 89. Раздвижные двери кабины гидравлических лифтов
- 90. Раздвижные двери кабины гидравлических лифтов
- 91. Раздвижные двери кабины гидравлических лифтов
- 92. Раздвижные двери кабины гидравлических лифтов
- 93. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 94. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 95. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 96. НАПРАВЛЯЮЩИЕ гидравлических лифтов
- 97. Конструкция и установка направляющих в шахте гидравлических лифтов
- 98. Конструкция и установка направляющих в шахте гидравлических лифтов
- 99. Конструкция и установка направляющих в шахте гидравлических лифтов
- 100. Расчет направляющих гидравлических лифтов
- 101. Гидравлические лифты - Методика расчета направляющих на прочность ижесткость
- 102. ЗАЩИТНЫЕ УСТРОЙСТВА гидравлических лифтов
- 103. Механические защитные устройства гидравлических лифтов
- 104. Ловители гидравлических лифтов
- 105. Улавливающие устройства ловителей гидравлических лифтов, их основныехарактеристики
- 106. Конструкция и принцип действия ловителей гидравлических лифтов
- 107. Ловители плавного торможения гидравлических лифтов
- 108. Расчет ловителей гидравлических лифтов
- 109. Механизмы привода ловителей гидравлических лифтов
- 110. Проверка работоспособности механизма включения ловителей гидравлическихлифтов
- 111. Ограничители скорости гидравлических лифтов
- 112. Конструкция и расчет ограничителей скорости гидравлических лифтов
- 113. Гидравлические лифты - конструкция и расчет ограничителя скорости синерционным роликом
- 114. Упоры и буферы гидравлических лифтов
- 115. Конструкция и расчет пружинного буфера гидравлических лифтов
- 116. Конструкция и расчет гидравлического буфера гидравлических лифтов
- 117. Гидравлические устройства предотвращения падения кабины лифта
- 118. Гидромеханическое устройство стопорения поршня гидравлических лифтов
- 119. Устройства защиты от медленного спуска кабины гидравлических лифтов
- 120. Применение ловителей для предотвращения медленного спуска кабиныгидравлических лифтов
- 121. Стопорные устройства защиты от медленного спуска кабины гидравлическихлифтов
- 122. Аварийные устройства эвакуации пассажиров из кабины гидравлических лифтов
- 123. Клапан ручного действия для спуска кабины гидравлических лифтов
- 124. ЭЛЕКТРОАППАРАТУРА гидравлических лифтов
- 125. Электрическая цепь пуска гидравлических лифтов
- 126. Электрическая цепь управления гидравлических лифтов
- 127. Гидравлические лифты - цепь управления с выравниванием при закрытыхдверях во время спуска и с автовыравниванием при открытых дверях
- 128. Гидравлические лифты - схема управления с выравниванием при закрытыхдверях
- 129. ШАХТЫ И МАШИННЫЕ ПОМЕЩЕНИЯ гидравлических лифтов
- 130. Шахты гидравлических лифтов
- 131. Собственно шахта гидравлических лифтов
- 132. Приямок гидравлических лифтов
- 133. Верхняя часть шахты гидравлических лифтов
- 134. Машинные помещения гидравлических лифтов
- 135. ЛИТЕРАТУРА (Гидравлические лифты)
- 136. ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ЭЛЕМЕНТОВ ОБЪЕМНОГО ГИДРОПРИВОДА ЛИФТОВОТЕЧЕСТВЕННОГО ПРОИЗВОДСТВА
- 137. ОГЛАВЛЕНИЕ - Гидравлические лифты (Архангельский Г.Г.)

от 1030.00 руб./шт.

от 224.00 руб./шт.

от 195.00 руб./шт.

от 195.00 руб./шт.

от 402.00 руб./шт.

от 402.00 руб./шт.

от 288.00 руб./шт.

от 288.00 руб./шт.

от 288.00 руб./шт.

от 56.00 руб./шт.

от 224.00 руб./шт.

от 138.00 руб./шт.