





Конструкция и принцип действия ловителей гидравлических лифтов - часть 1
Ловители резкого торможения изготавливаются на основе применения
улавливающих устройств клинового или роликового типа.
Рабочая поверхность тормозящего элемента конструкции обычно оснащается
зубьями или поперечной насечкой, что более характерно для роликовых
ловителей.
Для облегчения процесса снятия с ловителей после устранения аварийной
ситуации более целесообразна двусторонняя конструкция, с симметричным
расположением улавливающих устройств.
Применение зубьев и насечки с повышенной твердостью обеспечивает
увеличение приведенного значения коэффициента трения за счет работы
пластического деформирования поверхности направляющей.
Ловители резкого торможения останавливают кабину и противовес на очень
малом тормозном пути, измеряемом несколькими десятками миллиметров,
поэтому область их применения ограничена лифтами со скоростью движения
кабины не более 0,63 м/с.
Клиновые ловители с зубьями работают с линейно изменяющейся тормозной
силой, о чем свидетельствует характерный треугольный след на более
пластичной чем зуб поверхности направляющей.
Роликовые ловители с поперечной насечкой оставляют на поверхности след
менее определенной формы глубиной до 1 мм.
На рис. 11.2 приведен вариант конструкции роликового ловителя резкого
торможения.
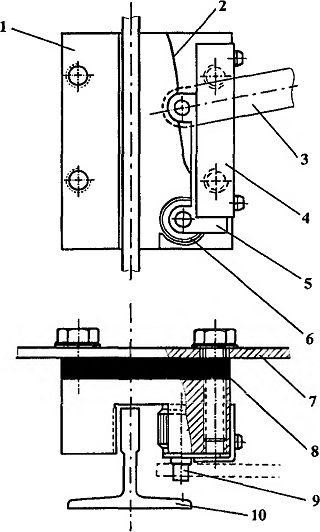
Рис.11.2 Роликовый ловитель резкого торможения: 1 - корпус; 2 - направляющая клиновая подушка; 3 - рычаг механизма включения ловителя; 4 - направляющая планка; 5 - подвижная тяга подъема ролика; 6 - ролик с наческой; 7 - элемент каркаса кабины; 8 - прокладка установочная; 9 -ось шарнира рычага 3; 10 - направляющая кабины
Ловители устанавливаются на торцевых поверхностях
балки или стоек каркаса кабины. Приводятся в действие механизмом
включения посредством рычага 3, который с помощью тяги 5 поднимает ролик
до момента его касания направляющей. После этого начинается процесс
самозаклинивания ролика между боковой поверхностью головки направляющей
и клиновой подушкой 2 с плавно изменяющимся углом клина. Благодаря
особенностям формы направляющей ролик поверхности клиновой подушки
достигается более плавное срабатывание ловителя и облегчается процесс
снятия кабины с ловителей. Ролик по боковым сторонам имеет гладкие
цилиндрические поверхности, которые перемещаются по соответствующим
выступам клиновой подушки. В связи с этим, величина коэффициента трения
ролика относительно клиновой подушки существенно меньше коэффициента
трения между его рифленой поверхностью и направляющей. Поэтому условие
самозаклинивания надежно выполняется (см. выше).
Конструкция клинового ловителя резкого торможения будет рассмотрена в
разделе, посвященном расчету ловителей.
Содержание
- 1. Гидравлические лифты (Архангельский Г.Г., Бабичев С.Д, Ваксман М.А.) -читать онлайн
- 2. ПРЕДИСЛОВИЕ (Гидравлические лифты)
- 3. История развития конструкции гидравлических лифтов
- 4. История развития конструкции гидравлических лифтов
- 5. История развития конструкции гидравлических лифтов
- 6. История развития конструкции гидравлических лифтов
- 7. История развития конструкции гидравлических лифтов
- 8. Современное состояние, тенденции и перспективы дальнейшегосовершенствования гидравлических лифтов
- 9. Классификация, кинематические схемы и техническая характеристикагидравлических лифтов
- 10. Классификация гидравлических лифтов
- 11. Техническая характеристика гидравлических лифтов
- 12. Общие требования к конструкции и параметрам гидравлических лифтов
- 13. Конструкция и принцип действия гидравлических лифтов и грузовых платформ
- 14. РАБОЧИЕ ЖИДКОСТИ ГИДРОПРИВОДА гидравлических лифтов
- 15. Минеральные масла гидравлических лифтов
- 16. Плотность и удельный вес минеральных масел гидравлических лифтов
- 17. Влияние воды на минеральные масла гидравлических лифтов
- 18. Влияние воздуха на минеральные масла гидравлических лифтов
- 19. Влияние температуры на минеральные масла гидравлических лифтов
- 20. Теплоемкость и теплопроводность рабочей жидкости гидравлических лифтов
- 21. Смазывающая способность и стабильность характеристик рабочей жидкостигидравлических лифтов
- 22. Влияние механических примесей на свойства рабочей жидкости гидравлическихлифтов
- 23. МЕХАНИЗМЫ ПОДЪЕМА С ГИДРОДВИГАТЕЛЯМИ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ
- 24. Канатные и рычажные мультипликаторы механизмов подъема гидравлическихлифтов
- 25. Тяговые органы канатных мультипликаторов гидравлических лифтов
- 26. Тяговые органы канатных мультипликаторов гидравлических лифтов
- 27. Основные характеристики канатного мультипликатора гидравлических лифтов
- 28. Гидроцилиндры механизма подъема гидравлических лифтов
- 29. Одноступенчатые гидроцилиндры гидравлических лифтов
- 30. Одноступенчатые гидроцилиндры гидравлических лифтов
- 31. Одноступенчатые гидроцилиндры гидравлических лифтов
- 32. Одноступенчатые штоки гидравлических лифтов, работающие на сжатие
- 33. Телескопические поршни гидравлических лифтов, работающие на сжатие
- 34. Телескопические поршни с механической синхронизацией нагидравлических лифтах
- 35. Телескопические поршни с гидравлической синхронизацией нагидравлических лифтах
- 36. Определение размеров телескопических поршней гидравлических лифтов
- 37. СИЛОВОЕ ОБОРУДОВАНИЕ ГИДРОПРИВОДА гидравлических лифтов
- 38. Бак для рабочей жидкости гидравлических лифтов
- 39. Бак для рабочей жидкости гидравлических лифтов
- 40. Электродвигатель привода насоса гидравлических лифтов
- 41. Электродвигатель привода насоса гидравлических лифтов
- 42. Насос гидроагрегата гидравлических лифтов
- 43. Насос гидроагрегата гидравлических лифтов
- 44. Шестеренчатые насосы гидравлических лифтов
- 45. Аксиально-поршневые насосы гидравлических лифтов
- 46. Винтовые насосы гидравлических лифтов
- 47. Винтовые насосы гидравлических лифтов
- 48. ВСПОМОГАТЕЛЬНОЕ ОБОРУДОВАНИЕ ГИДРОПРИВОДА гидравлических лифтов
- 49. Трубопровод гидропривода гидравлических лифтов
- 50. Уплотнения гидропривода гидравлических лифтов
- 51. Уплотнения гидропривода гидравлических лифтов
- 52. Фильтры гидропривода гидравлических лифтов
- 53. Фильтры гидропривода гидравлических лифтов
- 54. Антивибраторы и шумоподавители гидропривода гидравлических лифтов
- 55. Антивибраторы и шумоподавители гидропривода гидравлических лифтов
- 56. Теплообменники гидропривода гидравлических лифтов
- 57. Теплообменники гидропривода гидравлических лифтов
- 58. АППАРАТУРА УПРАВЛЕНИЯ ГИДРОПРИВОДА гидравлических лифтов
- 59. Клапаны гидропривода гидравлических лифтов
- 60. Дросселирующие клапаны гидропривода гидравлических лифтов
- 61. Дросселирующие клапаны гидропривода гидравлических лифтов
- 62. Клапаны ограничения давления гидропривода гидравлических лифтов
- 63. Клапаны регулирования потока рабочей жидкости гидропривода гидравлическихлифтов
- 64. Электроклапаны гидропривода гидравлических лифтов
- 65. Пропорциональные электроклапаны гидропривода гидравлических лифтов
- 66. Гидравлические схемы управления гидравлических лифтов
- 67. Простая гидравлическая система, не обеспечивающая точной остановки кабиныгидравлических лифтов
- 68. Гидравлическая система со скоростью выравнивания при спуске -гидравлические лифты
- 69. Лифтовая гидравлическая система с разными клапанами для подъема и спуска
- 70. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 71. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 72. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 73. Гидравлические схемы лифтов с электронной системой управления ипропорциональными клапанами
- 74. Гидролифты - Гидравлическая схема управления с частотным регулированием
- 75. ОСНОВЫ ТЯГОВОГО РАСЧЕТА ГИДРАВЛИЧЕСКОГО ЛИФТА
- 76. Расчет сопротивления движению башмаков кабины по направляющим угидравлических лифтов
- 77. Определение параметров гидроцилиндра гидравлических лифтов
- 78. Определение параметров силового оборудования гидравлических лифтов
- 79. КАБИНЫ ГИДРАВЛИЧЕСКИХ ЛИФТОВ
- 80. Конструкция кабины гидравлических лифтов
- 81. Конструкция кабины гидравлических лифтов
- 82. Устройства контроля загрузки кабины гидравлических лифтов
- 83. Каркас кабины лифта гидравлических лифтов
- 84. Каркас кабины лифта гидравлических лифтов
- 85. Прочностной расчет каркаса кабины гидравлических лифтов
- 86. Гидравлические лифты - расчет каркаса кабины лифта с гидроцилиндромпрямого действия
- 87. ДВЕРИ КАБИНЫ И ШАХТЫ гидравлических лифтов
- 88. Конструкция и работа механизма привода автоматических дверейгидравлических лифтов
- 89. Раздвижные двери кабины гидравлических лифтов
- 90. Раздвижные двери кабины гидравлических лифтов
- 91. Раздвижные двери кабины гидравлических лифтов
- 92. Раздвижные двери кабины гидравлических лифтов
- 93. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 94. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 95. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 96. НАПРАВЛЯЮЩИЕ гидравлических лифтов
- 97. Конструкция и установка направляющих в шахте гидравлических лифтов
- 98. Конструкция и установка направляющих в шахте гидравлических лифтов
- 99. Конструкция и установка направляющих в шахте гидравлических лифтов
- 100. Расчет направляющих гидравлических лифтов
- 101. Гидравлические лифты - Методика расчета направляющих на прочность ижесткость
- 102. ЗАЩИТНЫЕ УСТРОЙСТВА гидравлических лифтов
- 103. Механические защитные устройства гидравлических лифтов
- 104. Ловители гидравлических лифтов
- 105. Улавливающие устройства ловителей гидравлических лифтов, их основныехарактеристики
- 106. Конструкция и принцип действия ловителей гидравлических лифтов
- 107. Ловители плавного торможения гидравлических лифтов
- 108. Расчет ловителей гидравлических лифтов
- 109. Механизмы привода ловителей гидравлических лифтов
- 110. Проверка работоспособности механизма включения ловителей гидравлическихлифтов
- 111. Ограничители скорости гидравлических лифтов
- 112. Конструкция и расчет ограничителей скорости гидравлических лифтов
- 113. Гидравлические лифты - конструкция и расчет ограничителя скорости синерционным роликом
- 114. Упоры и буферы гидравлических лифтов
- 115. Конструкция и расчет пружинного буфера гидравлических лифтов
- 116. Конструкция и расчет гидравлического буфера гидравлических лифтов
- 117. Гидравлические устройства предотвращения падения кабины лифта
- 118. Гидромеханическое устройство стопорения поршня гидравлических лифтов
- 119. Устройства защиты от медленного спуска кабины гидравлических лифтов
- 120. Применение ловителей для предотвращения медленного спуска кабиныгидравлических лифтов
- 121. Стопорные устройства защиты от медленного спуска кабины гидравлическихлифтов
- 122. Аварийные устройства эвакуации пассажиров из кабины гидравлических лифтов
- 123. Клапан ручного действия для спуска кабины гидравлических лифтов
- 124. ЭЛЕКТРОАППАРАТУРА гидравлических лифтов
- 125. Электрическая цепь пуска гидравлических лифтов
- 126. Электрическая цепь управления гидравлических лифтов
- 127. Гидравлические лифты - цепь управления с выравниванием при закрытыхдверях во время спуска и с автовыравниванием при открытых дверях
- 128. Гидравлические лифты - схема управления с выравниванием при закрытыхдверях
- 129. ШАХТЫ И МАШИННЫЕ ПОМЕЩЕНИЯ гидравлических лифтов
- 130. Шахты гидравлических лифтов
- 131. Собственно шахта гидравлических лифтов
- 132. Приямок гидравлических лифтов
- 133. Верхняя часть шахты гидравлических лифтов
- 134. Машинные помещения гидравлических лифтов
- 135. ЛИТЕРАТУРА (Гидравлические лифты)
- 136. ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ЭЛЕМЕНТОВ ОБЪЕМНОГО ГИДРОПРИВОДА ЛИФТОВОТЕЧЕСТВЕННОГО ПРОИЗВОДСТВА
- 137. ОГЛАВЛЕНИЕ - Гидравлические лифты (Архангельский Г.Г.)

от 910.00 руб./шт.

от 0.00 руб./шт.

от 0.00 руб./шт.

от 1500.00 руб./шт.

от 109.00 руб./шт.

от 167.00 руб./шт.

от 46.00 руб./шт.

от 109.00 руб./шт.

от 1426.00 руб./шт.

от 0.00 руб./шт.

от 334.00 руб./шт.

от 265.00 руб./шт.