

9.3.
Кинематика и расчет механизма привода автоматических раздвижных дверей гидравлических лифтов - часть 1
Раздвижные автоматические двери широко используются в лифтах различного
назначения. При проектировании таких устройств основное внимание
уделяется удовлетворению следующих требований: а) кинетическая энергия
сближающихся створок не должна превышать допустимого уровня в 10 ДЖ [ 20
]; б) сила сжатия створок дверей должна быть не выше установленного
безопасного уровня в 150 Н; в) в конце хода закрывания (открытия)
створок их скорость должна практически равняться нулю; г) средняя
скорость движения створок должна выбираться с учетом ширины дверного
проема и скорости движения кабины.
Последнее требования является определяющим для лифтов с повышенными
скоростями движения кабины.
Ограничение величины кинетической энергии створок может быть достигнуто
за счет снижения скорости и приведенной массы створок с учетом
вращающихся частей привода.
На основе приведенной зависимости можно сделать
вывод, что для тихоходных лифтов наиболее рациональным путем уменьшения
кинетической энергии является снижение скорости. Для скоростных лифтов
предпочтительнее уменьшение массы створок.
Требования ПУБЭЛ в части ограничения усилия сжатия створок имеют прямое
отношение к конструкциям привода с электромеханической системой
автоматического реверса привода движения створок.
При установке на кабине электронной системы контроля наличия препятствий
на пути движения створок типа «антенна» автоматический реверс движения
створок происходит без контакта их с препятствием. При надежно
работающей системе «антенна» требование ограничения усилия сжатия
створок и кинетической энергии практически теряют смысл.
Необходимость обеспечения нулевой скорости створок продиктована
стремлением исключить ударные нагрузки и связанный с ними шум в конце
рабочего хода створок.
Выше было показано, что эта задача решается двумя основными способами.
Первый способ основан на использовании кинематической схемы привода,
обеспечивающей необходимый график изменения скорости створок.
Второй способ не предъявляет особых требований к кинематической схеме
механизма и основан на применении регулируемого электропривода.
Первый способ управления получил широкое распространение в начальный
период развития лифтостроения, когда промышленной электроники и
эффективных методов управления приводом практически не было.
Разработанные в те времена кинематические схемы привода продолжают
успешно применяться и в настоящее время (Рис.9.9).
На рис.9.16 - 9.18 приведены наиболее распространенные схемы привода, обеспечивающие синусоидальный график движения створок с нулевой скоростью в конце пути передвижения.
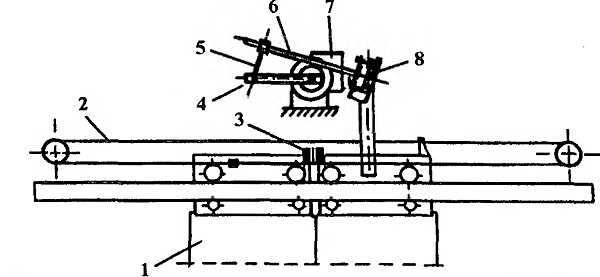
Рис.9.16 Кинематика привода автоматических
дверей с механизмом штангового типа: 1 -
створка; 2 - канат синхронизации движения створок; 3 - контакт контроля
притвора штепсельного типа; 4 - водило; 5 - кронштейн шарнирного
крепления штанги; 6 - штанга; 7 - механизм при-вода водила; 8 -
устройство “разрыва” штанги с микропереключателем реверса
Содержание
- 1. Гидравлические лифты (Архангельский Г.Г., Бабичев С.Д, Ваксман М.А.) -читать онлайн
- 2. ПРЕДИСЛОВИЕ (Гидравлические лифты)
- 3. История развития конструкции гидравлических лифтов
- 4. История развития конструкции гидравлических лифтов
- 5. История развития конструкции гидравлических лифтов
- 6. История развития конструкции гидравлических лифтов
- 7. История развития конструкции гидравлических лифтов
- 8. Современное состояние, тенденции и перспективы дальнейшегосовершенствования гидравлических лифтов
- 9. Классификация, кинематические схемы и техническая характеристикагидравлических лифтов
- 10. Классификация гидравлических лифтов
- 11. Техническая характеристика гидравлических лифтов
- 12. Общие требования к конструкции и параметрам гидравлических лифтов
- 13. Конструкция и принцип действия гидравлических лифтов и грузовых платформ
- 14. РАБОЧИЕ ЖИДКОСТИ ГИДРОПРИВОДА гидравлических лифтов
- 15. Минеральные масла гидравлических лифтов
- 16. Плотность и удельный вес минеральных масел гидравлических лифтов
- 17. Влияние воды на минеральные масла гидравлических лифтов
- 18. Влияние воздуха на минеральные масла гидравлических лифтов
- 19. Влияние температуры на минеральные масла гидравлических лифтов
- 20. Теплоемкость и теплопроводность рабочей жидкости гидравлических лифтов
- 21. Смазывающая способность и стабильность характеристик рабочей жидкостигидравлических лифтов
- 22. Влияние механических примесей на свойства рабочей жидкости гидравлическихлифтов
- 23. МЕХАНИЗМЫ ПОДЪЕМА С ГИДРОДВИГАТЕЛЯМИ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ
- 24. Канатные и рычажные мультипликаторы механизмов подъема гидравлическихлифтов
- 25. Тяговые органы канатных мультипликаторов гидравлических лифтов
- 26. Тяговые органы канатных мультипликаторов гидравлических лифтов
- 27. Основные характеристики канатного мультипликатора гидравлических лифтов
- 28. Гидроцилиндры механизма подъема гидравлических лифтов
- 29. Одноступенчатые гидроцилиндры гидравлических лифтов
- 30. Одноступенчатые гидроцилиндры гидравлических лифтов
- 31. Одноступенчатые гидроцилиндры гидравлических лифтов
- 32. Одноступенчатые штоки гидравлических лифтов, работающие на сжатие
- 33. Телескопические поршни гидравлических лифтов, работающие на сжатие
- 34. Телескопические поршни с механической синхронизацией нагидравлических лифтах
- 35. Телескопические поршни с гидравлической синхронизацией нагидравлических лифтах
- 36. Определение размеров телескопических поршней гидравлических лифтов
- 37. СИЛОВОЕ ОБОРУДОВАНИЕ ГИДРОПРИВОДА гидравлических лифтов
- 38. Бак для рабочей жидкости гидравлических лифтов
- 39. Бак для рабочей жидкости гидравлических лифтов
- 40. Электродвигатель привода насоса гидравлических лифтов
- 41. Электродвигатель привода насоса гидравлических лифтов
- 42. Насос гидроагрегата гидравлических лифтов
- 43. Насос гидроагрегата гидравлических лифтов
- 44. Шестеренчатые насосы гидравлических лифтов
- 45. Аксиально-поршневые насосы гидравлических лифтов
- 46. Винтовые насосы гидравлических лифтов
- 47. Винтовые насосы гидравлических лифтов
- 48. ВСПОМОГАТЕЛЬНОЕ ОБОРУДОВАНИЕ ГИДРОПРИВОДА гидравлических лифтов
- 49. Трубопровод гидропривода гидравлических лифтов
- 50. Уплотнения гидропривода гидравлических лифтов
- 51. Уплотнения гидропривода гидравлических лифтов
- 52. Фильтры гидропривода гидравлических лифтов
- 53. Фильтры гидропривода гидравлических лифтов
- 54. Антивибраторы и шумоподавители гидропривода гидравлических лифтов
- 55. Антивибраторы и шумоподавители гидропривода гидравлических лифтов
- 56. Теплообменники гидропривода гидравлических лифтов
- 57. Теплообменники гидропривода гидравлических лифтов
- 58. АППАРАТУРА УПРАВЛЕНИЯ ГИДРОПРИВОДА гидравлических лифтов
- 59. Клапаны гидропривода гидравлических лифтов
- 60. Дросселирующие клапаны гидропривода гидравлических лифтов
- 61. Дросселирующие клапаны гидропривода гидравлических лифтов
- 62. Клапаны ограничения давления гидропривода гидравлических лифтов
- 63. Клапаны регулирования потока рабочей жидкости гидропривода гидравлическихлифтов
- 64. Электроклапаны гидропривода гидравлических лифтов
- 65. Пропорциональные электроклапаны гидропривода гидравлических лифтов
- 66. Гидравлические схемы управления гидравлических лифтов
- 67. Простая гидравлическая система, не обеспечивающая точной остановки кабиныгидравлических лифтов
- 68. Гидравлическая система со скоростью выравнивания при спуске -гидравлические лифты
- 69. Лифтовая гидравлическая система с разными клапанами для подъема и спуска
- 70. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 71. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 72. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 73. Гидравлические схемы лифтов с электронной системой управления ипропорциональными клапанами
- 74. Гидролифты - Гидравлическая схема управления с частотным регулированием
- 75. ОСНОВЫ ТЯГОВОГО РАСЧЕТА ГИДРАВЛИЧЕСКОГО ЛИФТА
- 76. Расчет сопротивления движению башмаков кабины по направляющим угидравлических лифтов
- 77. Определение параметров гидроцилиндра гидравлических лифтов
- 78. Определение параметров силового оборудования гидравлических лифтов
- 79. КАБИНЫ ГИДРАВЛИЧЕСКИХ ЛИФТОВ
- 80. Конструкция кабины гидравлических лифтов
- 81. Конструкция кабины гидравлических лифтов
- 82. Устройства контроля загрузки кабины гидравлических лифтов
- 83. Каркас кабины лифта гидравлических лифтов
- 84. Каркас кабины лифта гидравлических лифтов
- 85. Прочностной расчет каркаса кабины гидравлических лифтов
- 86. Гидравлические лифты - расчет каркаса кабины лифта с гидроцилиндромпрямого действия
- 87. ДВЕРИ КАБИНЫ И ШАХТЫ гидравлических лифтов
- 88. Конструкция и работа механизма привода автоматических дверейгидравлических лифтов
- 89. Раздвижные двери кабины гидравлических лифтов
- 90. Раздвижные двери кабины гидравлических лифтов
- 91. Раздвижные двери кабины гидравлических лифтов
- 92. Раздвижные двери кабины гидравлических лифтов
- 93. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 94. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 95. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 96. НАПРАВЛЯЮЩИЕ гидравлических лифтов
- 97. Конструкция и установка направляющих в шахте гидравлических лифтов
- 98. Конструкция и установка направляющих в шахте гидравлических лифтов
- 99. Конструкция и установка направляющих в шахте гидравлических лифтов
- 100. Расчет направляющих гидравлических лифтов
- 101. Гидравлические лифты - Методика расчета направляющих на прочность ижесткость
- 102. ЗАЩИТНЫЕ УСТРОЙСТВА гидравлических лифтов
- 103. Механические защитные устройства гидравлических лифтов
- 104. Ловители гидравлических лифтов
- 105. Улавливающие устройства ловителей гидравлических лифтов, их основныехарактеристики
- 106. Конструкция и принцип действия ловителей гидравлических лифтов
- 107. Ловители плавного торможения гидравлических лифтов
- 108. Расчет ловителей гидравлических лифтов
- 109. Механизмы привода ловителей гидравлических лифтов
- 110. Проверка работоспособности механизма включения ловителей гидравлическихлифтов
- 111. Ограничители скорости гидравлических лифтов
- 112. Конструкция и расчет ограничителей скорости гидравлических лифтов
- 113. Гидравлические лифты - конструкция и расчет ограничителя скорости синерционным роликом
- 114. Упоры и буферы гидравлических лифтов
- 115. Конструкция и расчет пружинного буфера гидравлических лифтов
- 116. Конструкция и расчет гидравлического буфера гидравлических лифтов
- 117. Гидравлические устройства предотвращения падения кабины лифта
- 118. Гидромеханическое устройство стопорения поршня гидравлических лифтов
- 119. Устройства защиты от медленного спуска кабины гидравлических лифтов
- 120. Применение ловителей для предотвращения медленного спуска кабиныгидравлических лифтов
- 121. Стопорные устройства защиты от медленного спуска кабины гидравлическихлифтов
- 122. Аварийные устройства эвакуации пассажиров из кабины гидравлических лифтов
- 123. Клапан ручного действия для спуска кабины гидравлических лифтов
- 124. ЭЛЕКТРОАППАРАТУРА гидравлических лифтов
- 125. Электрическая цепь пуска гидравлических лифтов
- 126. Электрическая цепь управления гидравлических лифтов
- 127. Гидравлические лифты - цепь управления с выравниванием при закрытыхдверях во время спуска и с автовыравниванием при открытых дверях
- 128. Гидравлические лифты - схема управления с выравниванием при закрытыхдверях
- 129. ШАХТЫ И МАШИННЫЕ ПОМЕЩЕНИЯ гидравлических лифтов
- 130. Шахты гидравлических лифтов
- 131. Собственно шахта гидравлических лифтов
- 132. Приямок гидравлических лифтов
- 133. Верхняя часть шахты гидравлических лифтов
- 134. Машинные помещения гидравлических лифтов
- 135. ЛИТЕРАТУРА (Гидравлические лифты)
- 136. ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ЭЛЕМЕНТОВ ОБЪЕМНОГО ГИДРОПРИВОДА ЛИФТОВОТЕЧЕСТВЕННОГО ПРОИЗВОДСТВА
- 137. ОГЛАВЛЕНИЕ - Гидравлические лифты (Архангельский Г.Г.)

от 890.00 руб./шт.

от 185.00 руб./шт.

от 132.00 руб./шт.

от 103.00 руб./шт.

от 391.00 руб./шт.

от 17 518.00 руб./шт.

от 17 518.00 руб./шт.

от 17 518.00 руб./шт.

от 2559.00 руб./шт.

от 1578.00 руб./шт.

от 890.00 руб./шт.