





Гидравлические лифты - конструкция и расчет ограничителя скорости с инерционным роликом
Конструкция ограничителя скорости с инерционным роликом давно
применяется в зарубежной практике. Такими ограничителями оборудуются
лифты фирмы КОНЕ (Финляндия), ОТИС ( США), СМУ(Италия) и других
производителей лифтов. В нашей стране они не применялись, так как ПУБЭЛ
требовал наличия контрольного шкива, который в этой конструкции
отсутствовал. В настоящее время положение меняется в связи с развитием
рыночной экономики и расширением сферы использования лифтов зарубежных
фирм.
Конструкция ограничителя отличается простотой, удобством доступа ко всем
его частям и надежностью работы. Её основу составляет шкив, свободно
вращающийся на оси, закрепленной в опорной раме. На задней стороне шкива
имеется многогранник со скругленными вершинами, по поверхности которого
катится тяжелый ролик с резиновым ободом.
Устройство и принцип действия ограничителя наглядно демонстрируется его
расчетной схемой (Рис.11.13 ). На расчетной схеме приняты следующие
обозначения: Рр, Ри - сила тяжести и сила инерции ролика, направление
которой определяется фазой колебания ролика; Рп - сила сжатия пружины; ^уЛпЛр
постоянные расстояния от оси рычага; - плечо силы тяжести ролика от оси
вращения рычага; гьг2- максимальное и минимальное значение радиуса
положения ролика на поверхности четырехгранника;
- длина пружины в состоянии начального сжатия и упругое ее сжатие,
соответствующее моменту сцепления зуба рычага с упором шкива.
На Рис.11.13 не показан концевой выключатель и кронштейн для проверки
сил сцепления. Все остальные элементы в полной мере отражают особенности
конструкции ограничителя скорости.
Основу конструкции составляет шкив 1, свободно вращающийся на оси,
закрепленной в опорной раме 11.
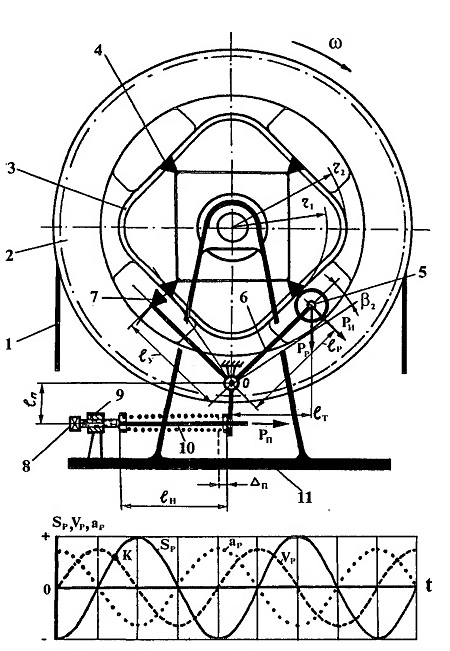
Рис. 11.13 Расчетно-конструктивная схема ограничителя скорости с инерционным роликом: 1 - канат; 2 -шкив; 3 - четырехгранный кулачок; 4 - упор кулачка; 5 -ролик; 6 - рычаг; 7 - зуб рычага; 8 - винт регулировочный; 9 - опора с гайкой винта; 10 - пружина с направляющим стержнем; 11 - рама опорная
На задней стороне шкива имеется четырехгранник 3 со
скругленными вершинами, по поверхности которого катится тяжелый ролик 5
с резиновым ободом.
Ролик установлен на конце равноплечего качающегося рычага 6,
противоположный конец которого выполнен в форме зуба 7.
На торцевой части четырехгранного кулачка 3 имеются упоры 4 клиновидной
формы, расположенные в одной плоскости с внутренним квадратом жесткости.
Ролик прижимается к ободу четырехгранного кулачка усилием предварительно
сжатой пружины 10 так, что при вращении шкива с номинальной скоростью он
следит за его поверхностью, совершая вынужденные кинематические
колебания относительно оси рычага.
Сила начального натяжения пружины уравновешивает действие силы тяжести
ролика и действие инерционной силы при номинальной частоте вращения.
При аварийном превышении скорости, под действием сил инерции, ролик 5
отрывается от поверхности кулачка и зуб 7 сцепляется с упором 4,
останавливая шкив.
Работа ограничителя контролируется выключателем, который приводится в
действие в момент сцепления зуба 7 с упором 4.
Контроль достаточности сил сцепления каната с
ободом шкива ограничителя скорости осуществляется путем нажатия на
специальный кронштейн, закрепленный на рычаге со стороны ролика. Зуб 7
сцепляется с упором 4 и останавливает шкив. Все происходит так, как и
при нажатии на подвижный упор ограничителя скорости центробежного типа.
На схеме рис. 11.13 приведен график изменения пути Sp скорости Vp и
ускорения Эр движения ролика 5 по поверхности кулачка 3.
При равномерном вращении шкива ограничителя скорости ролик совершает
кинематические колебания перекатываясь по поверхности четырехгранника.
Рычаг совершает угловые колебания относительно неподвижной точки О.
Благодаря скругленным вершинам четырехгранника закон изменения
перемещения ролика близок к гармоническому и описывается формулой
Рассмотрение приведенных зависимостей и
соответствующих графиков позволяет установить, что максимальное значение
силы инерции, отрывающей ролик от поверхности четырехгранника имеет
место в момент максимальной амплитуды перемещения ролика. Следовательно
сила предварительного сжатия пружины для номинальных оборотов шкива
должна определяться для момента, когда ролик находится на вершине
четырехгранника с учетом уравновешивания силы тяжести ролика. При этом,
будем исходить из предположения, что плечи рычага взаимно уравновешены.
Силу предварительного сжатия пружины определим из уравнения равновесия
рычага при амплитудном значении силы инерции
Дополнительное сжатие пружины Д„, при изменении
инерционной силы от номинального до предельного значения, определяется
из чертежа.
Момент отрыва ролика от поверхности четырехгранника, вероятно, будет
соответствовать точке К графика изменения перемещения ролика, когда и
инерционная сила, и скорость ролика имеют одно направление. При этом
величина инерционной силы и скорости будет составлять 0,707 максимальной
величины амплитуды, а ролик не дойдет до вершины четырехгранника на 11°
15’ угла поворота шкива.
Приведенные выше соображения могут быть положены в основу расчета
ограничителя скорости с инерционным роликом.
По чертежу определить величину сжатия пружины Д„, соответствующую
изменению силы сжатия пружины от номинального до предельного значения.
Пружина подбирается и рассчитывается по жесткости:
Содержание
- 1. Гидравлические лифты (Архангельский Г.Г., Бабичев С.Д, Ваксман М.А.) -читать онлайн
- 2. ПРЕДИСЛОВИЕ (Гидравлические лифты)
- 3. История развития конструкции гидравлических лифтов
- 4. История развития конструкции гидравлических лифтов
- 5. История развития конструкции гидравлических лифтов
- 6. История развития конструкции гидравлических лифтов
- 7. История развития конструкции гидравлических лифтов
- 8. Современное состояние, тенденции и перспективы дальнейшегосовершенствования гидравлических лифтов
- 9. Классификация, кинематические схемы и техническая характеристикагидравлических лифтов
- 10. Классификация гидравлических лифтов
- 11. Техническая характеристика гидравлических лифтов
- 12. Общие требования к конструкции и параметрам гидравлических лифтов
- 13. Конструкция и принцип действия гидравлических лифтов и грузовых платформ
- 14. РАБОЧИЕ ЖИДКОСТИ ГИДРОПРИВОДА гидравлических лифтов
- 15. Минеральные масла гидравлических лифтов
- 16. Плотность и удельный вес минеральных масел гидравлических лифтов
- 17. Влияние воды на минеральные масла гидравлических лифтов
- 18. Влияние воздуха на минеральные масла гидравлических лифтов
- 19. Влияние температуры на минеральные масла гидравлических лифтов
- 20. Теплоемкость и теплопроводность рабочей жидкости гидравлических лифтов
- 21. Смазывающая способность и стабильность характеристик рабочей жидкостигидравлических лифтов
- 22. Влияние механических примесей на свойства рабочей жидкости гидравлическихлифтов
- 23. МЕХАНИЗМЫ ПОДЪЕМА С ГИДРОДВИГАТЕЛЯМИ ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ
- 24. Канатные и рычажные мультипликаторы механизмов подъема гидравлическихлифтов
- 25. Тяговые органы канатных мультипликаторов гидравлических лифтов
- 26. Тяговые органы канатных мультипликаторов гидравлических лифтов
- 27. Основные характеристики канатного мультипликатора гидравлических лифтов
- 28. Гидроцилиндры механизма подъема гидравлических лифтов
- 29. Одноступенчатые гидроцилиндры гидравлических лифтов
- 30. Одноступенчатые гидроцилиндры гидравлических лифтов
- 31. Одноступенчатые гидроцилиндры гидравлических лифтов
- 32. Одноступенчатые штоки гидравлических лифтов, работающие на сжатие
- 33. Телескопические поршни гидравлических лифтов, работающие на сжатие
- 34. Телескопические поршни с механической синхронизацией нагидравлических лифтах
- 35. Телескопические поршни с гидравлической синхронизацией нагидравлических лифтах
- 36. Определение размеров телескопических поршней гидравлических лифтов
- 37. СИЛОВОЕ ОБОРУДОВАНИЕ ГИДРОПРИВОДА гидравлических лифтов
- 38. Бак для рабочей жидкости гидравлических лифтов
- 39. Бак для рабочей жидкости гидравлических лифтов
- 40. Электродвигатель привода насоса гидравлических лифтов
- 41. Электродвигатель привода насоса гидравлических лифтов
- 42. Насос гидроагрегата гидравлических лифтов
- 43. Насос гидроагрегата гидравлических лифтов
- 44. Шестеренчатые насосы гидравлических лифтов
- 45. Аксиально-поршневые насосы гидравлических лифтов
- 46. Винтовые насосы гидравлических лифтов
- 47. Винтовые насосы гидравлических лифтов
- 48. ВСПОМОГАТЕЛЬНОЕ ОБОРУДОВАНИЕ ГИДРОПРИВОДА гидравлических лифтов
- 49. Трубопровод гидропривода гидравлических лифтов
- 50. Уплотнения гидропривода гидравлических лифтов
- 51. Уплотнения гидропривода гидравлических лифтов
- 52. Фильтры гидропривода гидравлических лифтов
- 53. Фильтры гидропривода гидравлических лифтов
- 54. Антивибраторы и шумоподавители гидропривода гидравлических лифтов
- 55. Антивибраторы и шумоподавители гидропривода гидравлических лифтов
- 56. Теплообменники гидропривода гидравлических лифтов
- 57. Теплообменники гидропривода гидравлических лифтов
- 58. АППАРАТУРА УПРАВЛЕНИЯ ГИДРОПРИВОДА гидравлических лифтов
- 59. Клапаны гидропривода гидравлических лифтов
- 60. Дросселирующие клапаны гидропривода гидравлических лифтов
- 61. Дросселирующие клапаны гидропривода гидравлических лифтов
- 62. Клапаны ограничения давления гидропривода гидравлических лифтов
- 63. Клапаны регулирования потока рабочей жидкости гидропривода гидравлическихлифтов
- 64. Электроклапаны гидропривода гидравлических лифтов
- 65. Пропорциональные электроклапаны гидропривода гидравлических лифтов
- 66. Гидравлические схемы управления гидравлических лифтов
- 67. Простая гидравлическая система, не обеспечивающая точной остановки кабиныгидравлических лифтов
- 68. Гидравлическая система со скоростью выравнивания при спуске -гидравлические лифты
- 69. Лифтовая гидравлическая система с разными клапанами для подъема и спуска
- 70. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 71. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 72. Гидравлическая система, в которой одни и те же клапаны управляют ходомкабины лифта при подъеме и при спуске
- 73. Гидравлические схемы лифтов с электронной системой управления ипропорциональными клапанами
- 74. Гидролифты - Гидравлическая схема управления с частотным регулированием
- 75. ОСНОВЫ ТЯГОВОГО РАСЧЕТА ГИДРАВЛИЧЕСКОГО ЛИФТА
- 76. Расчет сопротивления движению башмаков кабины по направляющим угидравлических лифтов
- 77. Определение параметров гидроцилиндра гидравлических лифтов
- 78. Определение параметров силового оборудования гидравлических лифтов
- 79. КАБИНЫ ГИДРАВЛИЧЕСКИХ ЛИФТОВ
- 80. Конструкция кабины гидравлических лифтов
- 81. Конструкция кабины гидравлических лифтов
- 82. Устройства контроля загрузки кабины гидравлических лифтов
- 83. Каркас кабины лифта гидравлических лифтов
- 84. Каркас кабины лифта гидравлических лифтов
- 85. Прочностной расчет каркаса кабины гидравлических лифтов
- 86. Гидравлические лифты - расчет каркаса кабины лифта с гидроцилиндромпрямого действия
- 87. ДВЕРИ КАБИНЫ И ШАХТЫ гидравлических лифтов
- 88. Конструкция и работа механизма привода автоматических дверейгидравлических лифтов
- 89. Раздвижные двери кабины гидравлических лифтов
- 90. Раздвижные двери кабины гидравлических лифтов
- 91. Раздвижные двери кабины гидравлических лифтов
- 92. Раздвижные двери кабины гидравлических лифтов
- 93. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 94. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 95. Кинематика и расчет механизма привода автоматических раздвижных дверейгидравлических лифтов
- 96. НАПРАВЛЯЮЩИЕ гидравлических лифтов
- 97. Конструкция и установка направляющих в шахте гидравлических лифтов
- 98. Конструкция и установка направляющих в шахте гидравлических лифтов
- 99. Конструкция и установка направляющих в шахте гидравлических лифтов
- 100. Расчет направляющих гидравлических лифтов
- 101. Гидравлические лифты - Методика расчета направляющих на прочность ижесткость
- 102. ЗАЩИТНЫЕ УСТРОЙСТВА гидравлических лифтов
- 103. Механические защитные устройства гидравлических лифтов
- 104. Ловители гидравлических лифтов
- 105. Улавливающие устройства ловителей гидравлических лифтов, их основныехарактеристики
- 106. Конструкция и принцип действия ловителей гидравлических лифтов
- 107. Ловители плавного торможения гидравлических лифтов
- 108. Расчет ловителей гидравлических лифтов
- 109. Механизмы привода ловителей гидравлических лифтов
- 110. Проверка работоспособности механизма включения ловителей гидравлическихлифтов
- 111. Ограничители скорости гидравлических лифтов
- 112. Конструкция и расчет ограничителей скорости гидравлических лифтов
- 113. Гидравлические лифты - конструкция и расчет ограничителя скорости синерционным роликом
- 114. Упоры и буферы гидравлических лифтов
- 115. Конструкция и расчет пружинного буфера гидравлических лифтов
- 116. Конструкция и расчет гидравлического буфера гидравлических лифтов
- 117. Гидравлические устройства предотвращения падения кабины лифта
- 118. Гидромеханическое устройство стопорения поршня гидравлических лифтов
- 119. Устройства защиты от медленного спуска кабины гидравлических лифтов
- 120. Применение ловителей для предотвращения медленного спуска кабиныгидравлических лифтов
- 121. Стопорные устройства защиты от медленного спуска кабины гидравлическихлифтов
- 122. Аварийные устройства эвакуации пассажиров из кабины гидравлических лифтов
- 123. Клапан ручного действия для спуска кабины гидравлических лифтов
- 124. ЭЛЕКТРОАППАРАТУРА гидравлических лифтов
- 125. Электрическая цепь пуска гидравлических лифтов
- 126. Электрическая цепь управления гидравлических лифтов
- 127. Гидравлические лифты - цепь управления с выравниванием при закрытыхдверях во время спуска и с автовыравниванием при открытых дверях
- 128. Гидравлические лифты - схема управления с выравниванием при закрытыхдверях
- 129. ШАХТЫ И МАШИННЫЕ ПОМЕЩЕНИЯ гидравлических лифтов
- 130. Шахты гидравлических лифтов
- 131. Собственно шахта гидравлических лифтов
- 132. Приямок гидравлических лифтов
- 133. Верхняя часть шахты гидравлических лифтов
- 134. Машинные помещения гидравлических лифтов
- 135. ЛИТЕРАТУРА (Гидравлические лифты)
- 136. ОСНОВНЫЕ УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ЭЛЕМЕНТОВ ОБЪЕМНОГО ГИДРОПРИВОДА ЛИФТОВОТЕЧЕСТВЕННОГО ПРОИЗВОДСТВА
- 137. ОГЛАВЛЕНИЕ - Гидравлические лифты (Архангельский Г.Г.)

от 6237.00 руб./шт.

от 6825.00 руб./шт.

от 32 571.00 руб./шт.

от 5775.00 руб./шт.

от 6861.00 руб./шт.

от 6237.00 руб./шт.

от 6699.00 руб./шт.

от 4851.00 руб./шт.

от 5311.00 руб./шт.