12.4.
Регулируемый лифтовый привод постоянного тока
Приводы постоянного тока обычно применяются в скоростных лифтах,
поскольку обладают очень хорошими регулировочными характеристиками и
могут обеспечить диаграмму движения кабины лифта, близкую к оптимальной,
а также высокую точность остановки кабины.
До недавнего времени обычно применялись при этом приводы по системе
«генератор-двигатель» с возбудителем генератора. Однако, в настоящее
время наиболее часто применяется привод по системе «тиристорный
преобразователь-двигатель» (ТП-Д). Изменением
напряжения на якоре двигателя Д (рис. 12.50) с помощью тиристорного
преобразователя ТП обеспечивается плавное изменение скорости,
определяемое приведенными на рис. 12.506 механиче-скими характеристиками
электропривода.
Существенным достоинством тиристорного преобразователя является его
весьма малая инерционность по сравнению о генератором постоянного тока.
Это облегчает формирование требуемых динамических характеристик
электропривода. Коэффициент полезного действия привода ТП-Д выше, чем у
системы Г-Д. Кроме того, отсутствие вращающегося преобразователя
(генератора постоянного тока с синхронным или асинхронным двигателем)
уменьшает шум и вибрации.
Однако следует учитывать, что у тиристорного электропривода имеются и
недостатки. Основными из них являются низкий коэффициент мощности,
увеличи-вающий потребление реактивной мощности из сети, и высшие
гармонические, появляющиеся в питающей сети при работе тиристорного
преобразователя. Вследствие этого использование системы ТП-Д при слабых
питающих сетях затруднено.
Кроме того, односторонняя проводимость тиристоров требует принятия
специальных схемных решений для обеспечения реверса двигателя, что
усложняет схему управления.
Известны различные способы построения схем реверсивных электроприводов:
изменением полярности на обмотке возбуждения двигателя, изменением
полярности на зажимах якоря специальными переключателями (реверсорами)
изменением полярности напряжения на зажимах якоря с помощью двух
комплектов тиристорных преобразователей. Наибольшее распространение
получил последний способ, хотя он усложняет и удорожает электропривод,
поскольку при этом обеспечивается максимальное быстродействие привода
при торможении.
Большинство реверсивных электроприводов с двумя комплектами тиристорных
преобразователей выполняется по встречно-параллельной схеме. На рис.
12.51 приведены трехфазная нулевая (а) и мостовая (б)
встречно-параллельные схемы реверсивного электропривода, применяющиеся в
электроприводах подъемных машин.
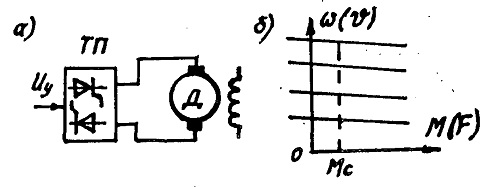
Рис.12.50. Электропривод постоянного тока с реверсивным тиристорным преобразователем
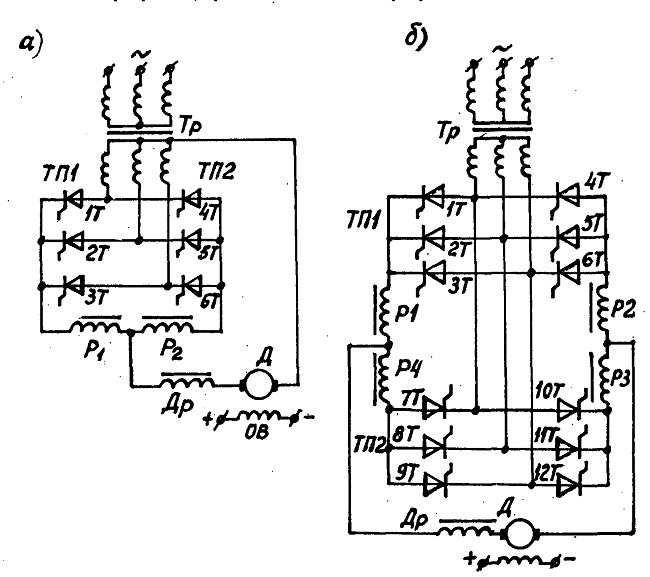
Рис. 12.51. Силовые схемы приводов постоянного тока с реверсивными тиристорными преобразователями
Реверсивный преобразователь, питающий якорь
двигателя, состоит из двух нереверсивных преобразователей ТП1 и 7772 с
общим силовым трансформатором Тр.
Работа в I и IV квадрантах осуществляется, когда включена, например,
группа тиристоров 1Т-ЗТ (рис.12.51 а) или 1Т-6Т (рис.12.51 б), а во II и
III квадрантах -тиристоры 4Т-6Т или 7Т-12Т соответственно.
Для преобразователя по схеме рис. 12.51 а двигательный режим I (III)
квадрантах осуществляется, когда тиристоры 1Т-ЗТ (4Т-6Т) работают в реже
выпрямления, а другой комплект тиристоров 4Т-6Т (1Т-ЗТ) при этом либо
закрыт, либо подготовлен для работы инвертором. Во II (IV) квадрантах
группа 4Т-6Т (1Т-ЗТ) является инверторной, а вторая группа тиристоров
закрыта либо подготовлена для работы в выпрямительном режиме.
Применяется несколько способов управления реверсивными комплектами
тиристоров. При совместном управлении управляющие сигналы подаются на
оба комплекта так, чтобы среднее значение э.д.с. инверторной группы не
было меньше э.д.с. выпрямительной группы. Под действием разности
мгновенных значений э.д.с. между двумя группами тиристоров протекают
уравнительные токи. Для их ограничения устанавливаются уравнительные
реакторы PI, Р2 (рис. 12.51а) или Р1-Р4 (рис. 12.516). Для сглаживания
пульсации выпрямленного тока включен сглаживающий дроссель Др.
Структура привода отечественного скоростного лифта (разработан
институтом ВНИИЭЛЕКТРОПРИВОД) показана на рис. 12.52. Привод включает в
себя двигатель М, тиристорный преобразователь 777, регулятор тока РТ,
регулятор скорости PC, регулятор положения кабины в зоне точной
остановки РП, датчики тока ДТ, скорости ДС и положения кабины ДП,
задатчик интенсивности ЗИ, потенциометр П задания сигналов большой и
малой скорости, контакты РЗ реле заведения, включающегося при заходе
кабины в зону замедления этажа назначения, контакты реле точной
остановки РТО, которое включено в режимах разгона, равномерного движения
и замедления и отключается при заходе кабины в зону точной остановки.
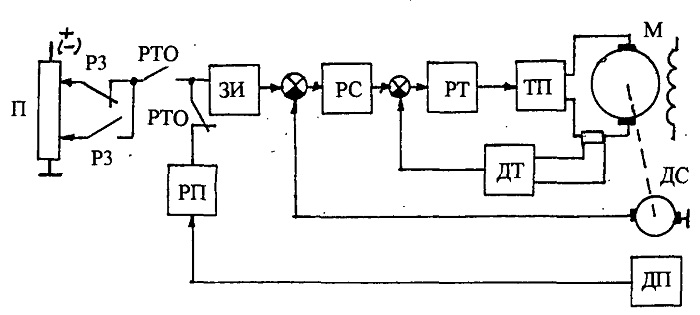
Рис. 12.52. Система регулирования привода постоянного тока скоростного лифта
Привод построен по принципу подчиненного регулирования параметров (положения кабины, скорости и тока), когда сигнал задания внутреннего контура регулирования (например, тока) определяется выходным сигналом регулятора внешнего контура (в данном случае скорости). Привод предусматривает два режима работы:
регулирование скорости, когда сигнал на вход
подается от источника постойного напряжения через потенциометр П
(работают два контура регулирования скорости и тока), и режим точной
остановки, при котором сигнал поступает от датчика положения кабины ДП
(подключается третий контур регулирования положения).
При пуске кабины высокое напряжение с потенциометра П через замкнутый
размыкающий контакт реле замедления РЗ и замкнутый замыкающий контакт
реле точной остановки РТО поступает на вход задатчика интенсивности ЗИ
(третий контур регулирования положения отключен при этом разомкнутым
размыкающим контактом реле РТО). Задатчик интенсивности преобразует
поступивший на его вход скачкообразный сигнал в плавно нарастающий с
учетом ограничений на величины рывка и ускорения (диаграмма 1 на рис.
12.53). Контур регулирования скорости с помощью контура регулирования
тока (и момента) двигателя с высокой точностью отрабатывает этот сигнал,
обеспечивая увеличение скорости привода до установившейся большой
скорости (диаграмма 2 на рис. 12.53). При подходе кабины к зоне точной
остановки этажа назначения включается реле замедления РЗ, которое
переключением своих контактов на рис. 12.52 скачком уменьшает снимаемый
с потенциометра П сигнал до величины, определяющей малую скорость
привода. Задатчик интенсивности ЗИ преобразует это скачкообразное
уменьшение сигнала в плавно уменьшающееся задание на входе регулятора
скорости РС, а привод обеспечивает плавное замед-ленние кабины с учетом
ограничений, накладываемых на рывок и ускорение (рис. 12.53).
При заходе кабины в зону точной остановки отключается реле РТО, которое
своими контактами (рис.12.52) отключает от входа задатчика интенсивности
ЗИ потенциометр П и подключает выход регулятора положения РП. Выходной
сигнал регулятора положения РП и включенного на его входе датчика
положения (схема и характеристики этого датчика описаны ранее)
пропорционален отклонению кабины от заданного уровня остановки кабины,
поэтому по мере приближения кабины к заданному уровню этот сигнал будет
уменьшаться, а вслед за этим будут уменьшаться выходной сигнал задатчика
интенсивности и скорость кабины (рис. 12.53). Нулевому отклонению кабины
от заданного уровня соответствует и нулевое значение сигнала задания
скорости. Таким образом, торможение кабины осуществляется в данном
случае не за счет момента, создаваемого механическим тормозом, а за счет
слежения за отклонением кабины от заданного уровня и приближения этого
отклонения к нулевому (или близкому к нему) за счет работы замкнутого по
положению контура регулирования. При этом точность остановки кабины
может быть обеспечена значительно лучше, чем при нерегулируемых
приводах.
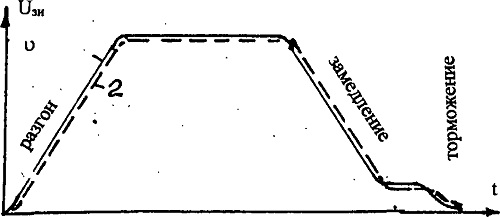
Рис.12.53. Диаграмма изменения выходного сигнала задатчика интенсивности (1) и скорости (2) при работе привода постоянного тока скоростного лифта
Содержание
- 1. Лифты (Волков Д. П.) - онлайн
- 2. Предисловие (лифты)
- 3. История развития лифтостроения
- 4. Современное состояние, тенденции и перспективы развития лифтостроения
- 5. Общие положения и определения классификации лифтов
- 6. Классификация лифтов
- 7. Кинематические схемы лифтов
- 8. Техническая характеристика лифтов
- 9. Общие требования к конструкции и параметрам лифтов
- 10. Устройство, компоновка и взаимодействие узлов лифта
- 11. ОСНОВЫ ПРОЕКТИРОВАНИЯ ВЕРТИКАЛЬНОГО ТРАНСПОРТА (ЛИФТОВ) ЗДАНИЙ ИСООРУЖЕНИЙ
- 12. Расчет производительности и необходимого числа лифтов
- 13. Размещение лифтов в зданиях и сооружениях
- 14. МЕХАНИЗМЫ ПОДЪЕМА ЛИФТОВ
- 15. Сравнительная характеристика лифтовых лебедок различного конструктивногоисполнения
- 16. Сравнительная характеристика лифтовых лебедок различного конструктивногоисполнения
- 17. Сравнительная характеристика лифтовых лебедок различного конструктивногоисполнения
- 18. Канаты и цепи лифтов
- 19. Барабаны, канатоведущие шкивы, блоки и контршкивы лифтов
- 20. Теория работы фрикционной передачи тягового усилия в лифтовых лебедках сКВШ
- 21. Редукторы лифтовых лебедок
- 22. Тормоза лифта
- 23. Тормоза лифта
- 24. Определение массы и уравновешивание подвижных частей МЕХАНИЗМА ПОДЪЕМАлифта
- 25. Расчет механизма подъема лифта
- 26. КАБИНЫ ЛИФТА
- 27. Каркас кабины лифта
- 28. Конструкция пола и устройств контроля загрузки кабины лифта
- 29. Конструкция пола и устройств контроля загрузки кабины лифта
- 30. Канатные подвески лифтов
- 31. Канатные подвески лифтов
- 32. Направляющие башмаки лифтов
- 33. ПРОТИВОВЕСЫ ЛИФТА
- 34. Динамика нагрузки металлоконструкций каркаса в режимах подскока изатягивания противовеса лифта
- 35. ДВЕРИ КАБИНЫ И ШАХТЫ ЛИФТА
- 36. Конструкция и работа механизма привода автоматических дверей лифта
- 37. Раздвижные двери кабины лифта
- 38. Конструкция и работа механизма привода автоматических дверей лифта
- 39. Кинематика и расчет механизма привода автоматических раздвижных дверейлифта
- 40. Кинематика и расчет механизма привода автоматических раздвижных дверейлифта
- 41. Кривошипно-шатунный (рычажный) механизм привода автоматических дверейлифта
- 42. Кинематика и расчет механизма привода автоматических раздвижных дверейлифта
- 43. ЛИФТОВЫЕ НАПРАВЛЯЮЩИЕ
- 44. Конструкция и установка направляющих в шахте лифта
- 45. ЛИФТОВЫЕ ЛОВИТЕЛИ
- 46. Классификация лифтовых ловителей
- 47. Лифтовые улавливающие устройства их основные характеристики
- 48. Механизм привода лифтовых ловителей
- 49. Механизм привода лифтовых ловителей
- 50. Конструкция, устройство и принцип действия лифтовых ловителей
- 51. Конструкция, устройство и принцип действия лифтовых ловителей
- 52. Расчет лифтовых ловителей
- 53. ЛИФТОВЫЕ ОГРАНИЧИТЕЛЬ СКОРОСТИ
- 54. Классификация лифтовых ограничителей скорости
- 55. Конструкция и расчет лифтового ограничителя скорости центробежного типа СГОРИЗОНТАЛЬНОЙ ОСЬЮ ВРАЩЕНИЯ
- 56. Конструкция и расчет ограничителя скорости с вертикальной осью вращения
- 57. ЛИФТОВЫЕ УПОРЫ И БУФЕРЫ
- 58. Конструкция и расчет лифтового пружинного буфера
- 59. Конструкция и расчет лифтового гидравлического буфера
- 60. ШАХТЫ, МАШИННЫЕ И БЛОЧНЫЕ ПОМЕЩЕНИЯ
- 61. Лифтовые машинные и блочные помещения
- 62. ЭЛЕКТРОПРИВОД И АВТОМАТИКА ЛИФТОВ
- 63. Оптимальная диаграмма движения кабины лифта
- 64. Силы и моменты нагрузки электроприводов лифтов
- 65. Динамические режимы электроприводов лифтов
- 66. Нерегулируемый лифтовый привод с односкоростным и двухскоростнымДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА
- 67. Регулируемый лифтовый привод переменного трехфазного тока
- 68. Регулируемый лифтовый привод переменного трехфазного тока
- 69. Регулируемый лифтовый привод постоянного тока
- 70. Общая характеристика систем управления лифтов
- 71. Лифтовые системы управления с контактной логикой
- 72. Лифтовые системы управления с бесконтактной логикой
- 73. Системы управления лифтами на базе микропроцессорной техники
- 74. МОНТАЖ ЛИФТОВ
- 75. Подготовка и организация монтажных лифтовых работ
- 76. Приемка и подготовка строительной части к монтажу лифта
- 77. Последовательность выполнения операций при монтаже лифта
- 78. Доставка лифтового оборудования к месту монтажа
- 79. Особенности монтажа оборудования при замене и модернизации лифтов
- 80. Определение координат установки оборудования лифта в шахте
- 81. Грузоподъемное и такелажное оборудование для монтажа лифтов
- 82. Механизированный инструмент, применяемый на монтаже лифтов
- 83. МОНТАЖ ЛИФТОВОЙ ШАХТЫ
- 84. Монтаж шахты лифта с металлическим каркасом
- 85. Монтаж лифтовой шахты из тюбингов
- 86. Способы крепления узлов и деталей оборудования лифта к строительнымконструкциям шахты и машинного помещения
- 87. Установка кронштейнов крепления направляющих кабины и противовеса лифта
- 88. Монтаж направляющих кабины и противовеса лифта
- 89. Монтаж направляющих кабины и противовеса лифта
- 90. Монтаж направляющих кабины и противовеса лифта
- 91. Монтаж направляющих кабины и противовеса лифта
- 92. Монтаж дверей шахты лифта
- 93. Монтаж дверей шахты лифта
- 94. Монтаж дверей шахты лифта
- 95. Монтаж дверей шахты лифта
- 96. Монтаж обрамлений дверных проемов лифтов
- 97. Монтаж оборудования приямка лифта
- 98. Монтаж противовеса лифта
- 99. Монтаж кабины лифта
- 100. Монтаж кабины лифта
- 101. Монтаж кабины лифта
- 102. Монтаж кабины лифта
- 103. Монтаж кабины лифта
- 104. Монтаж лифтовых лебедок и отводных блоков
- 105. Монтаж лифтовых лебедок и отводных блоков
- 106. Монтаж ограничителя скорости лифта
- 107. Навеска тяговых канатов лифта
- 108. Монтаж компенсирующих канатов и уравновешивающих цепей лифта
- 109. Монтаж электроаппаратуры лифта
- 110. Монтаж электроаппаратуры лифта
- 111. Монтаж электропроводки и кабелей лифтов
- 112. Монтаж электропроводки и кабелей лифтов
- 113. Монтаж электропроводки и кабелей лифтов
- 114. Монтаж электропроводки и кабелей лифтов
- 115. Монтаж электропроводки и кабелей лифтов
- 116. Устройство заземления (зануления) лифтовой установки
- 117. Замер сопротивления изоляции электрических цепей лифта
- 118. Наладка и сдача лифта в эксплуатацию
- 119. Опробование лифта
- 120. Опробование лифта
- 121. Регулировка оборудования лифта
- 122. Наладка лифтов. Наладочные работы
- 123. Обкатка и сдача лифта в эксплуатацию
- 124. Техника безопасности при монтаже лифтов
- 125. ЭКСПЛУАТАЦИЯ, ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ И РЕМОНТ ЛИФТОВ
- 126. Текущий и технический надзор за работой лифтов
- 127. Работоспособность лифтов
- 128. Структура службы эксплуатации лифтов
- 129. Структура службы эксплуатации лифтов
- 130. Структура службы эксплуатации лифтов
- 131. Приемка лифтового оборудования в эксплуатацию
- 132. Статические и динамические испытания лифтов
- 133. Порядок и содержание работы по проверке уровня технического состояниялифта
- 134. Порядок и содержание работы по проверке уровня технического состояниялифта
- 135. Порядок и содержание работы по проверке уровня технического состояниялифта
- 136. Порядок и содержание работы по проверке уровня технического состояниялифта
- 137. Система мониторинга технического состояния лифтов на основедиспетчеризации
- 138. Периодичность и содержание технического обслуживания иремонтно-профилактических работ
- 139. Периодичность и содержание технического обслуживания иремонтно-профилактических работ
- 140. Периодичность и содержание технического обслуживания иремонтно-профилактических работ
- 141. Полугодовой текущий ремонт ТР-6 пассажирских и грузопассажирских лифтов савтоматическим приводом дверей
- 142. Аварийный ремонт лифтов
- 143. Капитальный ремонт лифтов
- 144. Модернизация лифтов
- 145. Смазочные материалы и смазка деталей и узлов лифта
- 146. Смазочные материалы и смазка деталей и узлов лифта
- 147. Смазочные материалы и смазка деталей и узлов лифта
- 148. Смазочные материалы и смазка деталей и узлов лифта
- 149. Инструментальные испытания лифтового оборудования
- 150. Методологическая основа инструментальных испытаний лифтов
- 151. Электрические первичные преобразователи лифтов
- 152. Пьезоэлектрические преобразователи лифтов
- 153. Резисторные преобразователи лифта
- 154. Монтаж тензорезисторов лифта
- 155. Импульсные преобразователи лифта
- 156. Лифтовые измерительные цепи
- 157. Лифтовая мостовая измерительная цепь
- 158. Лифтовые измерительные цепи
- 159. Лифтовые регистрирующие устройства
- 160. Лифтовые самопишущие приборы
- 161. Лифтовые светолучевые осциллографы
- 162. Магнитографы лифтовые
- 163. Функциональные (заводские) испытания лифтов
- 164. Испытания узлов лифта
- 165. Сертификационные испытания лифта
- 166. Диагностирование лифтов
- 167. Прогнозирование остаточного ресурса лифтов
- 168. КАЧЕСТВО И СЕРТИФИКАЦИЯ ЛИФТОВ
- 169. Показатели качества лифтов
- 170. Надежность лифтов
- 171. Динамика, вибрации и шум лифтов
- 172. Оценка основных частот колебаний лифтов
- 173. Вынужденные колебания лифтов
- 174. Оценка долговечности и сроков службы лифтов
- 175. Оценка долговечности элементов лифта по износу
- 176. Оценка долговечности деталей лифта по износу
- 177. Системы качества и сертификации лифтов
- 178. Сертификация лифтов
- 179. ЛИТЕРАТУРА (лифты)
- 180. МОСКОВСКОЕ ГОСУДАРСТВЕННОЕ УНИТАРНОЕ ПРЕДПРИЯТИЕ МОСЛИФ
- 181. АКЦИОНЕРНАЯ КОМПАНИЯ ЗАКРЫТОГО ТИПА РУСЬЛИФТ
- 182. Открытое акционерное общество Карачаровский механический завод
- 183. ОТКРЫТОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО ЩЕРБИНСКИЙ ЛИФТОСТРОИТЕЛЬНЫЙ ЗАВОД
- 184. АКЦИОНЕРНАЯ КОМПАНИЯ МОСЛИФТМОНТАЖ
- 185. РОССИЙСКАЯ ФЕДЕРАЦИЯ ООО ПРЕДПРИЯТИЕ ИНЖЕНЕРНЫЙ ЦЕНТР КОЛИС
- 186. ИНЖЕНЕРНЫЙ ЦЕНТР ПО НЕЗАВИСИМОЙ ТЕХНИЧЕСКОЙ ЭКСПЕРТИЗЕ ЭСКАЛАТОРОВ ИЛИФТОВ
- 187. Предприятие ПОДЪЕМ Р О D Y О М
- 188. НАУЧНО-ПРОИЗВОДСТВЕННАЯ ФИРМА ЛИФТМОНТАЖ
- 189. Народная фирма Электропровод
- 190. ИКЦ ИНЖТЕХЛИФТ
- 191. СОДЕРЖАНИЕ Лифты (Волков Д. П.)

от 910.00 руб./шт.

от 0.00 руб./шт.

от 0.00 руб./шт.

от 1500.00 руб./шт.

от 109.00 руб./шт.

от 167.00 руб./шт.

от 46.00 руб./шт.

от 109.00 руб./шт.

от 1426.00 руб./шт.

от 0.00 руб./шт.

от 334.00 руб./шт.

от 265.00 руб./шт.