

Регулируемый лифтовый привод переменного трехфазного тока - часть 2
Для обеспечения полностью бесконтактной коммутации силовых цепей
асинхронного электродвигателя может использоваться реверсивный
тиристорный регулятор напряжения, один из вариантов которого приведен на
рис. 12.44. При одном направлении движения открыты тиристоры 1, 2, 3, 4
и заперты тиристоры 5, 6, 7, 8. Для обеспечения противоположного
направления движения запираются тиристоры 1-4 и отпираются тиристоры
5-8, что меняет местами фазы А и С. Фаза В при нормальной работе не
разрывается.
Режим динамического торможения осуществляется тиристорами 9 и 3 при
одном направлении движения и тиристорами 9 и 7 -при противоположном
направлении. В первом
случае запираются все тиристоры, кроме пары 9 и 3. На тиристор 3 подают
управляющие импульсы с углом отпирания, обеспечивающим протекание в
обмотках двигателя выпрямленного однополупериодного тока нужной
величины. Этот ток вызывает во время каждого положительного полупериода
динамическое торможение двигателя. Тиристор 9 (шунтирующий) открывается
в каждый отрицательный полупериод - непроводящий дли тиристора 3. При
такой поочередной работе тиристоров 3 и 9 увеличивается постоянная
составляющая выпрямленного тока. Кроме того, при замыкании тиристора 9
может действовать э.д.с. самоиндукции обмоток двигателя. В результате
торможение получается более эффективным. Ха-рактеристики электропривода
в режиме разгона и замедления аналогичны приведенным на рис. 12.43 б.
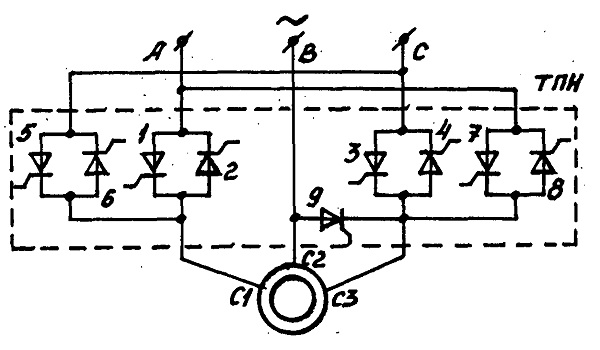
Рис. 12.44. Электропривод с односкоростным асинхронным двигателем и реверсивным тиристорным регулятором напряжения
В случае применения двухскоростного асинхронного двигателя (например,
когда для ревизионных работ требуется пониженная скорость) обычно
управление режимом разгона осуществляется с помощью тиристорного
регулятора напряжения, включаемого в обмотку большой скорости (рис.
12.45), а для обеспечения управляемого динамического торможения
используется дополнительный регулируемый тиристорный выпрямитель ТВ (полууправляе-мый
однофазный мост), который в режиме замедления подключается к обмотке
малой скорости. В остальном принцип работы и характеристики
соответствуют рис. 12.43.
Фирма КОНЭ использует для регулируемого привода лифта транзисторный
преобразователь частоты, упрощенная силовая схема которого приведена на
рис. 12.46. Односкоростной асинхронный двигатель М питается от
преобразователя, который включает в себя выпрямитель А1 трехфазного
напряжения и преобразователь постоянного напряжения в трехфазное
синусоидальное с изменяемой частотой А2, транзисторы которого
переключаются с помощью блока управления АЗ.
Для формирования переменного тока необходимой частоты используется
широтно-импульсная модуляция (ШИМ). Формируемые импульсы напряжения,
подаваемого на двигатель, имеют одинаковую амплитуду, но ширина
импульсов может регулироваться. Если импульсы короткие, а промежутки
между ними длительны, среднее значение напряжения мало, а при увеличении
длительности импульсов среднее значение напряжения увеличивается. Если
импульсы вначале делают
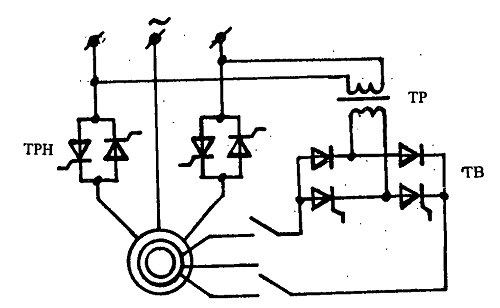
Рис. 12.45. Электропривод с двухскоростным асинхронным двигателем, с питанием обмотки большой скорости от тиристорного регулятора напряжения и подключением дополнительного тиристорного выпрямителя к обмотке малой скорости в режиме динамического торможения
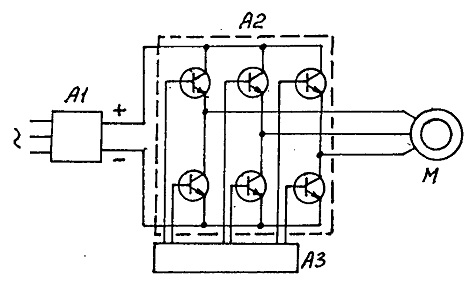
Рис. 12.46. Силовая схема регулируемого асинхронного привода с транзисторным преобразователем частоты
достаточно короткими, затем расширяют и потом снова
укорачивают, то поучают изменение среднего напряжения, соответствующее
положительному полупериоду синусоиды (рис. 12.47). После этого
напряжение импульсов можно изменить на отрицательное и повторить те же
операции. Результатом является отрицательный полупе-риод синусоиды.
Путем многократного повторения этих полупериодов получают непрерывное
синусоидальное переменное напряжение (разумеется, это относится лишь к
первой гармонике), частота и напряжение которых изменяются в
соответствии с задачами питания двигателя в режимах разгона,
равномерного движения и торможения кабины лифта.
Такая реализация преобразователя с использованием широтно-импульсной
модуляции обычно проще, чем регулирование уровня напряжения. Прерывание,
то есть образование импульсов, осуществляется простой коммутацией
транзисторов (рис. 12.46), действующих как выключатели. Если прерывание
происходит достаточно быстро (здесь частота импульсов составляет 6 кГц),
двигатель не будет реагировать на быстрое изменения напряжения
(вследствие его инерционности), а движение двигателя и кабины лифта
будет определяться частотой и амплитудой сформированного описанным выше
способом синусоидального напряжения.
Переключатель напряжения представляет собой для каждой фазы
транзисторный модуль (рис. 12.46), состоящий из двух транзисторов, где
верхний транзистор регулирует положительное, а нижний транзистор -
отрицательное напряжение в соответствующие полупериоды питающего
напряжения двигателя.
При использовании преобразователя привод лифта (рис. 12.48) представляет
собой замкнутую по скорости систему автоматического регулирования,
включающую
в себя двигатель М, преобразователь П, регулятор Р, датчик скорости TG и
задатчик интенсивности ЗИ.
При работе лифта задатчик интенсивности формирует подаваемый на вход
замкнутого контура регулирования сигнал задания Uзи,
определяющий требуемую диаграмму движения и достаточно близкую к
оптимальной. Интенсивность нарастания
сигнала Um на этапах разгона и торможения
соответствует требуемому значению ускорения, близкому к допустимому.
Замкнутый контур регулирования отрабатывает это задание с небольшим
отставанием, определяемым инерционностью привода, и обеспечивает
изменение скорости v движения кабины лифта (диаграмма
2 на рис. 12.49), которое мало отличается от оптимального и мало зависит
от загрузки кабины (вследствие самого принципа работы замкнутой системы
регулирования, обеспечивающей уменьшение влияния возмущений на
регулируемую величину). При реализации указанной диаграммы движения
уменьшается время перемещения кабины (по сравнению с нерегулируемым
приводом) и повышается производительность лифта.
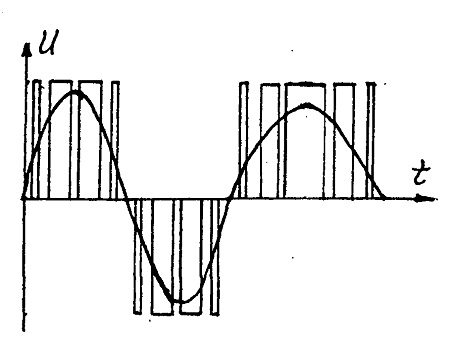
Рис. 12.47. Формирование переменного напряжения с помощью широтно-импульсной модуляции
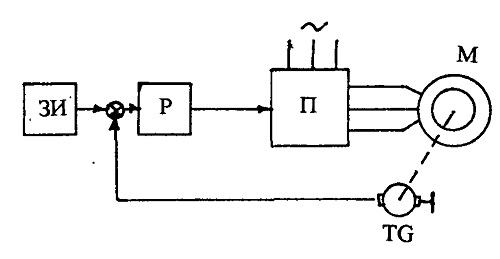
Рис. 12.48. Система регулирования асинхронного привода лифта
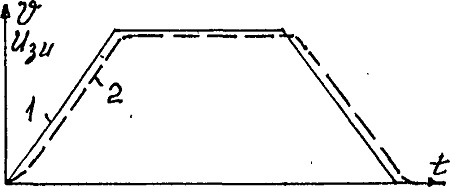
Рис. 12.49. График изменения сигнала с задатчика интенсивности (1) и диаграмма движения регулируемого асинхронного привода (2)
Содержание
- 1. Лифты (Волков Д. П.) - онлайн
- 2. Предисловие (лифты)
- 3. История развития лифтостроения
- 4. Современное состояние, тенденции и перспективы развития лифтостроения
- 5. Общие положения и определения классификации лифтов
- 6. Классификация лифтов
- 7. Кинематические схемы лифтов
- 8. Техническая характеристика лифтов
- 9. Общие требования к конструкции и параметрам лифтов
- 10. Устройство, компоновка и взаимодействие узлов лифта
- 11. ОСНОВЫ ПРОЕКТИРОВАНИЯ ВЕРТИКАЛЬНОГО ТРАНСПОРТА (ЛИФТОВ) ЗДАНИЙ ИСООРУЖЕНИЙ
- 12. Расчет производительности и необходимого числа лифтов
- 13. Размещение лифтов в зданиях и сооружениях
- 14. МЕХАНИЗМЫ ПОДЪЕМА ЛИФТОВ
- 15. Сравнительная характеристика лифтовых лебедок различного конструктивногоисполнения
- 16. Сравнительная характеристика лифтовых лебедок различного конструктивногоисполнения
- 17. Сравнительная характеристика лифтовых лебедок различного конструктивногоисполнения
- 18. Канаты и цепи лифтов
- 19. Барабаны, канатоведущие шкивы, блоки и контршкивы лифтов
- 20. Теория работы фрикционной передачи тягового усилия в лифтовых лебедках сКВШ
- 21. Редукторы лифтовых лебедок
- 22. Тормоза лифта
- 23. Тормоза лифта
- 24. Определение массы и уравновешивание подвижных частей МЕХАНИЗМА ПОДЪЕМАлифта
- 25. Расчет механизма подъема лифта
- 26. КАБИНЫ ЛИФТА
- 27. Каркас кабины лифта
- 28. Конструкция пола и устройств контроля загрузки кабины лифта
- 29. Конструкция пола и устройств контроля загрузки кабины лифта
- 30. Канатные подвески лифтов
- 31. Канатные подвески лифтов
- 32. Направляющие башмаки лифтов
- 33. ПРОТИВОВЕСЫ ЛИФТА
- 34. Динамика нагрузки металлоконструкций каркаса в режимах подскока изатягивания противовеса лифта
- 35. ДВЕРИ КАБИНЫ И ШАХТЫ ЛИФТА
- 36. Конструкция и работа механизма привода автоматических дверей лифта
- 37. Раздвижные двери кабины лифта
- 38. Конструкция и работа механизма привода автоматических дверей лифта
- 39. Кинематика и расчет механизма привода автоматических раздвижных дверейлифта
- 40. Кинематика и расчет механизма привода автоматических раздвижных дверейлифта
- 41. Кривошипно-шатунный (рычажный) механизм привода автоматических дверейлифта
- 42. Кинематика и расчет механизма привода автоматических раздвижных дверейлифта
- 43. ЛИФТОВЫЕ НАПРАВЛЯЮЩИЕ
- 44. Конструкция и установка направляющих в шахте лифта
- 45. ЛИФТОВЫЕ ЛОВИТЕЛИ
- 46. Классификация лифтовых ловителей
- 47. Лифтовые улавливающие устройства их основные характеристики
- 48. Механизм привода лифтовых ловителей
- 49. Механизм привода лифтовых ловителей
- 50. Конструкция, устройство и принцип действия лифтовых ловителей
- 51. Конструкция, устройство и принцип действия лифтовых ловителей
- 52. Расчет лифтовых ловителей
- 53. ЛИФТОВЫЕ ОГРАНИЧИТЕЛЬ СКОРОСТИ
- 54. Классификация лифтовых ограничителей скорости
- 55. Конструкция и расчет лифтового ограничителя скорости центробежного типа СГОРИЗОНТАЛЬНОЙ ОСЬЮ ВРАЩЕНИЯ
- 56. Конструкция и расчет ограничителя скорости с вертикальной осью вращения
- 57. ЛИФТОВЫЕ УПОРЫ И БУФЕРЫ
- 58. Конструкция и расчет лифтового пружинного буфера
- 59. Конструкция и расчет лифтового гидравлического буфера
- 60. ШАХТЫ, МАШИННЫЕ И БЛОЧНЫЕ ПОМЕЩЕНИЯ
- 61. Лифтовые машинные и блочные помещения
- 62. ЭЛЕКТРОПРИВОД И АВТОМАТИКА ЛИФТОВ
- 63. Оптимальная диаграмма движения кабины лифта
- 64. Силы и моменты нагрузки электроприводов лифтов
- 65. Динамические режимы электроприводов лифтов
- 66. Нерегулируемый лифтовый привод с односкоростным и двухскоростнымДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА
- 67. Регулируемый лифтовый привод переменного трехфазного тока
- 68. Регулируемый лифтовый привод переменного трехфазного тока
- 69. Регулируемый лифтовый привод постоянного тока
- 70. Общая характеристика систем управления лифтов
- 71. Лифтовые системы управления с контактной логикой
- 72. Лифтовые системы управления с бесконтактной логикой
- 73. Системы управления лифтами на базе микропроцессорной техники
- 74. МОНТАЖ ЛИФТОВ
- 75. Подготовка и организация монтажных лифтовых работ
- 76. Приемка и подготовка строительной части к монтажу лифта
- 77. Последовательность выполнения операций при монтаже лифта
- 78. Доставка лифтового оборудования к месту монтажа
- 79. Особенности монтажа оборудования при замене и модернизации лифтов
- 80. Определение координат установки оборудования лифта в шахте
- 81. Грузоподъемное и такелажное оборудование для монтажа лифтов
- 82. Механизированный инструмент, применяемый на монтаже лифтов
- 83. МОНТАЖ ЛИФТОВОЙ ШАХТЫ
- 84. Монтаж шахты лифта с металлическим каркасом
- 85. Монтаж лифтовой шахты из тюбингов
- 86. Способы крепления узлов и деталей оборудования лифта к строительнымконструкциям шахты и машинного помещения
- 87. Установка кронштейнов крепления направляющих кабины и противовеса лифта
- 88. Монтаж направляющих кабины и противовеса лифта
- 89. Монтаж направляющих кабины и противовеса лифта
- 90. Монтаж направляющих кабины и противовеса лифта
- 91. Монтаж направляющих кабины и противовеса лифта
- 92. Монтаж дверей шахты лифта
- 93. Монтаж дверей шахты лифта
- 94. Монтаж дверей шахты лифта
- 95. Монтаж дверей шахты лифта
- 96. Монтаж обрамлений дверных проемов лифтов
- 97. Монтаж оборудования приямка лифта
- 98. Монтаж противовеса лифта
- 99. Монтаж кабины лифта
- 100. Монтаж кабины лифта
- 101. Монтаж кабины лифта
- 102. Монтаж кабины лифта
- 103. Монтаж кабины лифта
- 104. Монтаж лифтовых лебедок и отводных блоков
- 105. Монтаж лифтовых лебедок и отводных блоков
- 106. Монтаж ограничителя скорости лифта
- 107. Навеска тяговых канатов лифта
- 108. Монтаж компенсирующих канатов и уравновешивающих цепей лифта
- 109. Монтаж электроаппаратуры лифта
- 110. Монтаж электроаппаратуры лифта
- 111. Монтаж электропроводки и кабелей лифтов
- 112. Монтаж электропроводки и кабелей лифтов
- 113. Монтаж электропроводки и кабелей лифтов
- 114. Монтаж электропроводки и кабелей лифтов
- 115. Монтаж электропроводки и кабелей лифтов
- 116. Устройство заземления (зануления) лифтовой установки
- 117. Замер сопротивления изоляции электрических цепей лифта
- 118. Наладка и сдача лифта в эксплуатацию
- 119. Опробование лифта
- 120. Опробование лифта
- 121. Регулировка оборудования лифта
- 122. Наладка лифтов. Наладочные работы
- 123. Обкатка и сдача лифта в эксплуатацию
- 124. Техника безопасности при монтаже лифтов
- 125. ЭКСПЛУАТАЦИЯ, ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ И РЕМОНТ ЛИФТОВ
- 126. Текущий и технический надзор за работой лифтов
- 127. Работоспособность лифтов
- 128. Структура службы эксплуатации лифтов
- 129. Структура службы эксплуатации лифтов
- 130. Структура службы эксплуатации лифтов
- 131. Приемка лифтового оборудования в эксплуатацию
- 132. Статические и динамические испытания лифтов
- 133. Порядок и содержание работы по проверке уровня технического состояниялифта
- 134. Порядок и содержание работы по проверке уровня технического состояниялифта
- 135. Порядок и содержание работы по проверке уровня технического состояниялифта
- 136. Порядок и содержание работы по проверке уровня технического состояниялифта
- 137. Система мониторинга технического состояния лифтов на основедиспетчеризации
- 138. Периодичность и содержание технического обслуживания иремонтно-профилактических работ
- 139. Периодичность и содержание технического обслуживания иремонтно-профилактических работ
- 140. Периодичность и содержание технического обслуживания иремонтно-профилактических работ
- 141. Полугодовой текущий ремонт ТР-6 пассажирских и грузопассажирских лифтов савтоматическим приводом дверей
- 142. Аварийный ремонт лифтов
- 143. Капитальный ремонт лифтов
- 144. Модернизация лифтов
- 145. Смазочные материалы и смазка деталей и узлов лифта
- 146. Смазочные материалы и смазка деталей и узлов лифта
- 147. Смазочные материалы и смазка деталей и узлов лифта
- 148. Смазочные материалы и смазка деталей и узлов лифта
- 149. Инструментальные испытания лифтового оборудования
- 150. Методологическая основа инструментальных испытаний лифтов
- 151. Электрические первичные преобразователи лифтов
- 152. Пьезоэлектрические преобразователи лифтов
- 153. Резисторные преобразователи лифта
- 154. Монтаж тензорезисторов лифта
- 155. Импульсные преобразователи лифта
- 156. Лифтовые измерительные цепи
- 157. Лифтовая мостовая измерительная цепь
- 158. Лифтовые измерительные цепи
- 159. Лифтовые регистрирующие устройства
- 160. Лифтовые самопишущие приборы
- 161. Лифтовые светолучевые осциллографы
- 162. Магнитографы лифтовые
- 163. Функциональные (заводские) испытания лифтов
- 164. Испытания узлов лифта
- 165. Сертификационные испытания лифта
- 166. Диагностирование лифтов
- 167. Прогнозирование остаточного ресурса лифтов
- 168. КАЧЕСТВО И СЕРТИФИКАЦИЯ ЛИФТОВ
- 169. Показатели качества лифтов
- 170. Надежность лифтов
- 171. Динамика, вибрации и шум лифтов
- 172. Оценка основных частот колебаний лифтов
- 173. Вынужденные колебания лифтов
- 174. Оценка долговечности и сроков службы лифтов
- 175. Оценка долговечности элементов лифта по износу
- 176. Оценка долговечности деталей лифта по износу
- 177. Системы качества и сертификации лифтов
- 178. Сертификация лифтов
- 179. ЛИТЕРАТУРА (лифты)
- 180. МОСКОВСКОЕ ГОСУДАРСТВЕННОЕ УНИТАРНОЕ ПРЕДПРИЯТИЕ МОСЛИФ
- 181. АКЦИОНЕРНАЯ КОМПАНИЯ ЗАКРЫТОГО ТИПА РУСЬЛИФТ
- 182. Открытое акционерное общество Карачаровский механический завод
- 183. ОТКРЫТОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО ЩЕРБИНСКИЙ ЛИФТОСТРОИТЕЛЬНЫЙ ЗАВОД
- 184. АКЦИОНЕРНАЯ КОМПАНИЯ МОСЛИФТМОНТАЖ
- 185. РОССИЙСКАЯ ФЕДЕРАЦИЯ ООО ПРЕДПРИЯТИЕ ИНЖЕНЕРНЫЙ ЦЕНТР КОЛИС
- 186. ИНЖЕНЕРНЫЙ ЦЕНТР ПО НЕЗАВИСИМОЙ ТЕХНИЧЕСКОЙ ЭКСПЕРТИЗЕ ЭСКАЛАТОРОВ ИЛИФТОВ
- 187. Предприятие ПОДЪЕМ Р О D Y О М
- 188. НАУЧНО-ПРОИЗВОДСТВЕННАЯ ФИРМА ЛИФТМОНТАЖ
- 189. Народная фирма Электропровод
- 190. ИКЦ ИНЖТЕХЛИФТ
- 191. СОДЕРЖАНИЕ Лифты (Волков Д. П.)

от 6237.00 руб./шт.

от 6825.00 руб./шт.

от 32 571.00 руб./шт.

от 5775.00 руб./шт.

от 6861.00 руб./шт.

от 6237.00 руб./шт.

от 6699.00 руб./шт.

от 4851.00 руб./шт.

от 5311.00 руб./шт.