

Соединения обмоток лифтовых электродвигателей с фазовым и короткозамкнутым роторами
Частота вращения ротора асинхронного
электродвигателя зависит от сопротивления роторной обмотки. На рис.
97,(5 изображены четыре механические характеристики одного и того же
электродвигателя. Первая механическая характеристика I естественная и
соответствует номинальной величине сопротивления роторной обмотки.
Частота вращения ротора при наличии на его валу номинального реактивного
момента Мн а равна nh Если в цепь роторной обмотки ввести добавочное
сопротивление и снять кривую частоты вращения ротора в зависимости от
приложенного к валу ротора момента Мр, получим механическую
характеристику II. При номинальном моменте, равном Мнр, частота вращения
ротора будет несколько ниже, чем при работе электродвигателя на
естественной характеристике.
При дальнейшем увеличении сопротивления в роторной цепи мы получим новые
механические характеристики, например III и IV и т. д, причем частота
вращения ротора при одной и той же нагрузке, приложенной к его валу,
будет уменьшаться. Все механические характеристики асинхронного
электродвигателя, кроме первой естественной, называются искусственными.
Электродвигатели с фазовым ротором имеют роторную обмотку, которая
выполнена так же, как и статорная обмотка, и соединена в звезду.
Выводные провода от этой обмотки присоединяются к трем контактным
изолированным друг от друга и от вала кольцам, выполненным из бронзы и
укрепленным на валу электродвигателя. К этим же контактным кольцам при
помощи мет,нографитных щеток, укрепленных на траверсе, присоединяются
добавочные сопротивления. Секционный ввод добавочных сопротивлений нужен
для того, чтобы обеспечить плавный пуск электродвигателя в ход, так как
пуск такого электродвигателя (МТК, МТ — крановые электродвигатели в
настоящее время в лифтостроении не применяются) с короткозамкнутой
обмоткой сопровождается недопустимым рывком.
В лифтостроении применяются асинхронные электродвигатели с
короткозамкнутыми роторами с повышенным скольжением. Это позволяет
производить плавный пуск короткозамкнутого электродвигателя
Автоматическое изменение сопротивления роторной обмотки достигается за
счет изменения конструкции проводников, из которых она состоит, и
использования в связи с этим эффекта вытеснения электрического тока
(поверхностного эффекта). Этот эффект заключается в том, что плотность
переменного тока в различных точках поперечного сечения провода
неодинакова. Наименьшая плотность в центре провода, наибольшая — у
поверхности Это объясняется тем, что внутренние слои проводника,
расположенные ближе к центру, охватываются большим магнитным потоком,
чем внешние. Известно, что чем больше магнитный поток охватывает
проводник, тем больше его индуктивное сопротивление Так как величина
индуктивного сопротивления провода зависит от частоты питающего тока f и
индуктивности провода L, индуктивное сопротивление провода в точках
поперечного сечения,
прилегающих к центру, с увеличением частоты может увеличиться настолько, что практически центральная часть провода при определенной частоте питающего тока пропускать ток не будет. Таким образом уменьшается сечение проводника, по которому течет ток и, как следствие этого, увеличивается его сопротивление. Сопротивление провода уменьшается с уменьшением частоты питающего тока и с уменьшением магнитного потока.
Если рассмотреть конфигурацию поперечного сечения
стержней, составляющих роторные обмотки асинхронных электродвигателей
без повышенного скольжения и с повышенным скольжением (так называемые
глубокопазные электродвигатели), можно увидеть существенную разницу.
Если сечение стержня роторной обмотки электродвигателя без повышенного
скольжения представляет собой круг, то в глубокопазных электродвигателях
применяются стержни роторной обмотки, у которых профиль сечения таков,
что его высота в несколько раз больше ширины, т. е. к центру ротора
сечение стержня простирается дальше, чем по поверхности (рис. 98).
Точки поперечного сечения стержня, расположенные ближе к центру ротора,
будут охватываться большим магнитным потоком, так как магнитные линии
стремятся идти по пути наименьшего сопротивления и большее их количество
будет действовать ближе к центру ротора. В связи с этим активное
сопротивление точек сечения стержня, прилегающих к центру, будет
наибольшим, а сопротивление точек сечения этого стержня, прилегающих к
поверхности ротора, — наименьшим. Поэтому ток вытесняется и течет по
поверхностным слоям стержня.
Рассмотрим пуск и разгон ротора такого электродвигателя. В момент
присоединения статорной обмотки электродвигателя к электрической сети
возникшее вращающееся электромагнитное поле пересекает стержни обмотки
неподвижного ротора и наводит в них э. д. с, под действием которой в них
протекает ток. В этот момент стержни охватываются наибольшим числом
магнитных ситовых линий и имеют поэтому наибольшее активное
сопротивление. По мере увеличения частоты вращения ротора количество
магнитных силовых линий, сцепленных со стержнями, уменьшается,
уменьшается также и активное сопротивление
стержней Таким образом, по мере увеличения частоты
вращения ротора активное сопротивление роторной обмотки автоматически от
какой-то величины уменьшается до номинальной. В конце разгона
электродвигатель с глубоким пазом приобретает свойства обыкновенного
электродвигателя нормального исполнения. Автоматическое изменение
сопротивления роторной обмотки асинхронного электродвигателя дает
возможность несколько увеличить время разгона ротора, сделать разгон
плавным, без рывков.
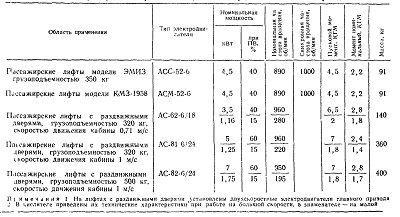
В табл. 23 приведены краткие технические характеристики применяемых на
лифтах асинхронных электродвигателей.
К напряжению, питающему асинхронные электродвигатели, предъявляются
следующие требования.
Отклонение напряжения на зажимах электродвигателей от номинального, как
правило, должно быть не более ±5%; в отдельных случаях допускается
отклонение выше номинального до + 10%.
Это требование связано с тем, что критический момент пропорционален
квадрату напряжения
Мкр = U2. (10.З)
Поэтому с падением напряжения в питающей сети критический момент резко
уменьшается и при определенном напряжении ниже номинального этот момент
может стать меньше номинального. При таких условиях неподвижный ротор с
приложенной к его валу реактивной (тормозной) нагрузкой вращаться не
будет.
Если же к валу ротора приложена активная (двигательная) нагрузка (кабина
лифта загружена номинальным грузом), то вслед за подачей напряжения на
статорную обмотку электродвигателя после расторможения подъемного
механизма ротор электродвигателя станет вращаться в обратную сторону, т.
е наступит так называемое «опрокидывание» электродвигателя, что опасно
при эксплуатации лифтов.
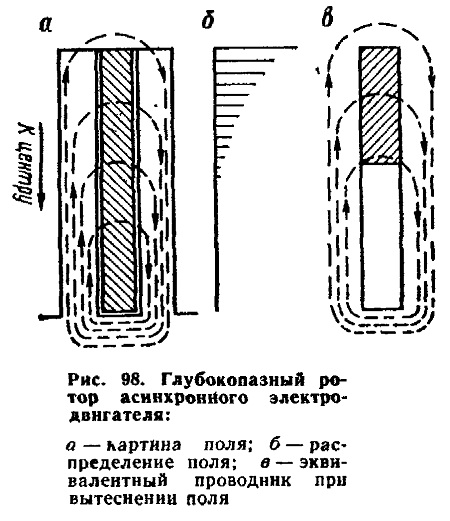
Рис. 98. Глубокопазный ротор асинхронного электроддвигателя
Таблица 23
Краткие технические характеристики лифтовых асинхронных
электродвигателей главного привода
Содержание
- 1. Ермишкин В. Г. Техническое обслуживание лифтов онлайн
- 2. МАШИННЫЕ, БЛОЧНЫЕ ПОМЕЩЕНИЯ И ШАХТЫ ЛИФТОВ
- 3. Техническое обслуживание лифтовых машинных, блочных помещений и шахт
- 4. Распашные двери шахты лифтов
- 5. Автоматические и неавтоматические замками лифтов
- 6. Автоматические и неавтоматические замками лифтов
- 7. Электромагнитная отводка лифта
- 8. Раздвижные двери шахты лифта
- 9. Раздвижные двери шахты лифта
- 10. Распашные двери кабины и блок-контакты притвора створок лифта
- 11. Раздвижные двери кабины и блок-контакты контроля притвора створок
- 12.
- 13. Автоматический привод дверей лифтов
- 14. Автоматический привод дверей лифтов
- 15. Автоматический привод дверей лифтов
- 16. Техническое обслуживание лифтов
- 17. Техническое обслуживание лифтов
- 18. Техническое обслуживание лифтов
- 19. Лифты с раздвижными дверями и автоматическим приводом
- 20. Лифты с раздвижными дверями и автоматическим приводом
- 21. Лифты с раздвижными дверями и автоматическим приводом
- 22. Замена автоматических и неавтоматических замков дверей шахты лифтов сраспашными дверями
- 23. Замена автоматических и неавтоматических замков дверей шахты лифтов сраздвижными дверями
- 24. Технический осмотр распашных дверей кабины лифта
- 25. Технический осмотр раздвижных дверей кабины лифта
- 26. Технический осмотр узлов привода дверей лифта
- 27. Технический осмотр узлов привода дверей лифта
- 28. Замена электродвигателя лифта
- 29. Лифтовые редукторы
- 30. Лифтовые редукторы
- 31. Лифтовые редукторы
- 32. Лифтовые редукторы
- 33. Лифтовые канатоведущие шкивы
- 34. Лифтовые канатоведущие шкивы
- 35. Технический осмотр редуктора и канатоведущего шкива лифта
- 36. Технический осмотр редуктора и канатоведущего шкива лифта
- 37. ТОРМОЗНЫЕ УСТРОЙСТВА ЛИФТОВ
- 38. Тормозные электромагниты лифтов
- 39. Тормозные электромагниты лифтов
- 40. Тормозные электромагниты лифтов
- 41. Лифтовые тормоза
- 42. Технический осмотр и регулировка лифтового тормозного устройства сдлинноходовым тормозным электромагнитом КМТД-102
- 43. Ремонт лифтового тормоза тормозного устройства с длинноходовымэлектромагнитом КМТД-102
- 44. Особенности эксплуатации лифтовых тормозных устройств завода ЭМ ИЗ
- 45. Особенности эксплуатации лифтовых тормозных устройств с короткоходовымитормозными электромагнитами МП-201
- 46. ЛИФТОВЫЕ КАНАТЫ
- 47. ЛИФТОВЫЕ КАНАТЫ
- 48. ЛИФТОВЫЕ КАНАТЫ
- 49. ЛИФТОВЫЕ КАНАТЫ
- 50. Лифтовые подвески
- 51. Лифтовые подвески
- 52. Лифтовые подвески
- 53. Техническое обслуживание лифтовых канатов и подвесок
- 54. Технический осмотр лифтовых тяговых канатов
- 55. Технический осмотр лифтовых тяговых канатов
- 56. Технический осмотр лифтовых тяговых канатов
- 57. Технический осмотр лифтовых тяговых канатов
- 58. Технический осмотр лифтовых тяговых канатов
- 59. Замена лифтовых тяговых канатов при верхнем расположении машинногопомещения
- 60. Замена лифтовых тяговых канатов при верхнем расположении машинногопомещения
- 61. Лифтовые кабины
- 62. Лифтовые кабины
- 63. Лифтовые кабины
- 64. Подвижный пол кабины лифта
- 65. Противовес лифта
- 66. Направляющие для кабины лифта
- 67. Направляющие для кабины лифта
- 68. Технический осмотр кабины и противовеса, направляющих кабины ипротивовеса лифта
- 69. Технический осмотр купе и каркас кабины лифта
- 70. Технический осмотр противовеса лифта
- 71. Технический осмотр направляющих кабины и противовеса лифта
- 72. Технический осмотр и регулировка башмаков кабин лифтов моделей ЭМИЗ иКМЗ-1958
- 73. Технический осмотр и регулировка башмаков противовеса лифта модели ЭМИЗ
- 74. Технический осмотр и регулировка башмаков кабины и противовеса лифтов сраздвижными дверями
- 75. ЛИФТОВЫЕ ОГРАНИЧИТЕЛИ СКОРОСТИ
- 76. ЛИФТОВЫЕ ОГРАНИЧИТЕЛИ СКОРОСТИ
- 77. Ловители лифта
- 78. Клиновые ловители лифта
- 79. Технический осмотр и регулировка лифтовых ловителей
- 80. Технический осмотр и регулировка ограничителей скорости лифта
- 81. Замена ограничителей скорости лифта
- 82. Замена клиньев ловителей, разборка комбинированных ловителей лифтов
- 83. ВВОДНЫЕ РУБИЛЬНИКИ ЛИФТОВ
- 84. Технический осмотр вводного рубильника лифта
- 85. Трансформаторы лифтов
- 86. Трансформаторы лифтов
- 87. Реле и контакторы лифтов
- 88. Электромагнитные реле времени на лифтах
- 89. Емкостное реле времени на лифтах
- 90. Характеристика контактных групп реле и контакторов на лифтах
- 91. Автоматические выключатели на лифтах
- 92. Выпрямительные устройства на лифтах
- 93. Лифтовая двухполупериодная электросхема выпрямления переменного тока впостоянный
- 94. Лифт модели ЭМИЗ - электросхема
- 95. Лифт модели ЭМИЗ - Назначение блокировочных контактов, не имеющихмеханической связи с реле или контакторами
- 96. Лифт модели ЭМИЗ - Последовательность работы элементов электрическойсхемы но вызову кабины
- 97. Лифт модели ЭМИЗ - Работа электросхемы по приказам
- 98. Лифт модели ЭМИЗ -Работа электросхемы лифта по приказам
- 99. Лифт модели КМЗ-1958 - электросхема
- 100. Лифт модели КМЗ-1958 - Характеристика электрической схемы лифта
- 101. Лифт модели КМЗ-1958 - Работа электросхемы по приказам
- 102. Лифт модели КМЗ-1958 - Управление лифтом из машинного помещения
- 103. Лифт модели 1964 г. с неподвижным полом - электросхема
- 104. Лифт модели 1964 г. с неподвижным полом - Характеристика электрическойсхемы
- 105. Лифт с парным управлением с раздвижными дверями модели 1966 г -электросхема
- 106. Лифт с парным управлением с раздвижными дверями модели 1966 г -Назначение электроаппаратов и их контактов
- 107. Характеристика электрической схемы пассажирских лифтов со скоростьюдвижения кабины 1 м/с с парным управлением
- 108. Панели управления наиболее распространенных лифтов
- 109. Технический осмотр и регулировка электроаппаратов, установленных намагнитной станции лифта
- 110. Технический осмотр и регулировка реле типа МКУ-48 и ПЭ-6 на лифтах
- 111. Технический осмотр и регулировка реле типа РП-23 на лифтах
- 112. Технический осмотр и регулировка лифтовых электромагнитные реле времени
- 113. Технический осмотр и регулировка лифтовых контакторов КТП В-621
- 114. Технический осмотр и регулировка лифтовых контакторов ПА-421
- 115. Технический осмотр и регулировка лифтовых контакторов ПА-421
- 116. Технический осмотр электросхемы лифта модели ЭМИЗ
- 117. Технический осмотр электросхемы лифтов модели КМЗ-1958
- 118. Технический осмотр электросхемы лифтов модели 1966 г. с раздвижнымидверями
- 119. Замена электроаппаратов лифтов
- 120. АСИНХРОННЫЕ ЭЛЕКТРОДВИГАТЕЛИ ЛИФТОВ
- 121. Соединения обмоток асинхронных электродвигателей лифтов
- 122. Соединения обмоток лифтовых электродвигателей с фазовым икороткозамкнутым роторами
- 123. Технический осмотр асинхронного электродвигателя лифта
- 124. Замена электродвигателя главного привода лифта
- 125. Замена электродвигателя главного привода лифта
- 126. ЛИФТОВЫЕ ЭТАЖНЫЕ ПЕРЕКЛЮЧАТЕЛИ, ИНДУКТИВНЫЕ И КОНТАКТНЫЕ ДАТЧИКИ СЕЛЕКЦИИИ ДАТЧИКИ ТОЧНОЙ ОСТАНОВКИ
- 127. Лифтовые индуктивные датчики селекции и датчики точной остановки
- 128. Лифтовые контактные датчики типа ДПЭ-101 на герконах
- 129. Технический осмотр лифтовых этажных переключателей
- 130. Технический осмотр лифтовых индуктивных датчиков селекции и точнойостановки, контактные датчики тип ДПЭ
- 131. Замена лифтовых этажных переключателей, индуктивных и контактных датчиковселекции и датчиков точной остановки
- 132. ЛИФТОВЫЕ КОНЕЧНЫЕ ВЫКЛЮЧАТЕЛИ
- 133. Технический осмотр и регулировка лифтовых конечных выключатели рубящеготипа
- 134. Технический осмотр и регулировка лифтовых конечных выключателей ПЭ-1 1
- 135. Технический осмотр и регулировка лифтовых конечных выключателей ВК-200Б
- 136. Замена лифтовых конечных выключателей
- 137. ТЕХНИКА БЕЗОПАСНОСТИ ПРИ ТЕХНИЧЕСКОМ ОБСЛУЖИВАНИИ ЛИФТОВ
- 138. ТЕХНИКА БЕЗОПАСНОСТИ ПРИ ТЕХНИЧЕСКОМ ОБСЛУЖИВАНИИ ЛИФТОВ
- 139. ТЕХНИКА БЕЗОПАСНОСТИ ПРИ ТЕХНИЧЕСКОМ ОБСЛУЖИВАНИИ ЛИФТОВ
- 140. Общие требования при работах на лифте
- 141. Наложение и снятие переносных заземлений на лифте
- 142. Переключение электросхем лифтов
- 143. Работа, выполняемая в машинном и блочном помещениях лифта
- 144. Сварочные работы в машинных помещениях лифтов
- 145. Работа в шахте лифта
- 146. Требования техники безопасности при перемещении кабины лифта по шахте
- 147. Электросварочные работы в шахте лифта
- 148. Работа в шахте лифта в зоне верхнего крайнего рабочего этажа
- 149. Выполнение работ на лифтах с парным управлением грузоподъемностью 320 и500 кгс и скоростью движения кабины 1 м/с
- 150. Работа в приямке и в зоне нижнего крайнего этажа шахты лифта
- 151. Перечень запрещенных методов выполнения работ на лифтах
- 152. СПИСОК ЛИТЕРАТУРЫ (лифты)
- 153. Принципиальная электрическая схема пассажирского лифта грузоподъемностью320 или 500 кг со скоростью 1 м/с для жилых здании
- 154. Принципиальная электрическая схема пассажирского лифта грузоподъемностью500 или 1000 кг со скоростью 1 м/с для административных здании
- 155. Принципиальная электрическая схема пассажирского лифта грузоподъемностью500 или 1000 кг со скоростью 1,5 м/с административных здании (аа)
- 156. Принципиальная электрическая схема трех пассажирских лифтовгрузоподъемностью 500 или 1000 кг со скоростью 1 м/с для административных зданийс групповым управлением

от 890.00 руб./шт.

от 185.00 руб./шт.

от 132.00 руб./шт.

от 103.00 руб./шт.

от 391.00 руб./шт.

от 17 518.00 руб./шт.

от 17 518.00 руб./шт.

от 17 518.00 руб./шт.

от 0.00 руб./шт.

от 2559.00 руб./шт.

от 1578.00 руб./шт.

от 890.00 руб./шт.