





12.5.4.
Системы управления лифтами на базе микропроцессорной техники
Использование микропроцессорной техники в системе управления лифтом обеспечивается формирование информационных и управляющих сигналов в результате выполнения введенной в систему программы. Это уменьшает количество используемых элементов и упрощает электрическую схему (правда, за счет использования более сложных элементов), а главное, увеличивает функциональные возможности системы управления и делает ее более универсальной. Рассмотрим принцип работы микропроцессорного блока электронной селекции отечественного быстроходного лифта, упрощенная схема которого приведена на рис. 12.57 (указаны только основные элементы схемы и связи между ними).
Центральной частью этого блока является
микропроцессор серии К1830ВЕ31. В основу принципа работы электронного
селектора положен метод тактового опроса всех устройств (датчиков),
контролирующих положение кабины лифта в шахте, а также всех кнопок
вызывных и приказных постов. К устройствам, контролирующим положение
кабины в шахте, относятся датчики верхнего и нижнего этажей СДВЭ и ДНЭ),
датчик точной остановки ДТО, датчики замедления вверх ДчЗВв и вниз -
ДчЗВн. Датчики ДТО, ДчЗВв и ДчЗВн установлены на кабине лифта. Они
взаимодействуют с шунтами, расположенными в шахте лифта в зонах
замедления и точной остановки у каждой остановочной площадки (здесь
реализуется счетный принцип определения положения кабины в шахте).
Микропроцессор с помощью программы, записанной в запоминающем устройстве
4 (микросхема К573РФ5), организует цикл из определенного количества
тактовых импульсов, достаточного для опроса всех датчиков и кнопок
вызова и приказа.
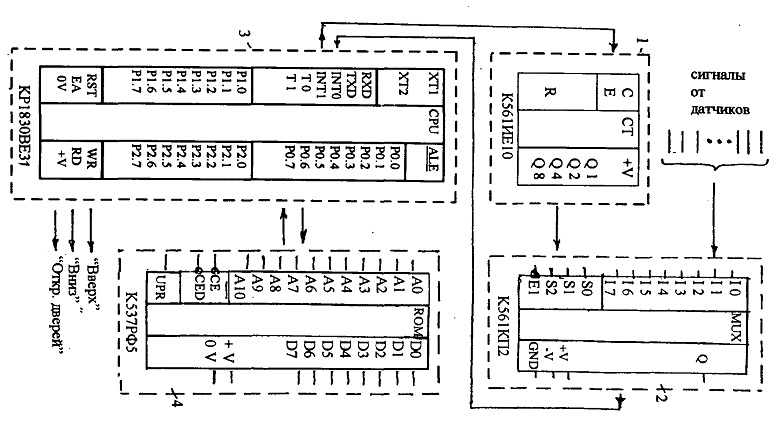
Рис. 12.57. Микропроцессорный блок электронной
селекции отечественного быстроходного лифта 1 - счетчик; 2 -
мультиплексор; 3 - микропроцессор;
4 - запоминающее устройство
Счет этажей осуществляется микропроцессором 3 при
движении кабины вниз по сигналам от датчика замедления вниз, а при
движении кабины снизу вверх - по сигналам от датчика замедления вверх.
. Последовательность опроса устройств - строго определенная.
Микропроцессор четко фиксирует номер импульса, который он посылает. За
каждым номером импульса закреплено одно определенное устройство,
вследствие чего микропроцессор «знает», какое устройство в данный момент
опрашивается. Для выделения при действии тактового импульса опроса
сигнала от соответствующего ему опрашиваемого устройства используются
мультиплексоры (в блоке 2 их несколько для обслуживания нужного
количества опрашиваемых устройств). При этом на информационные входы
10-17 подключены выходы опрашиваемых устройств, а появление на его
выходе Q одного из этих сигналов определяется подаваемым на адресные
входы SO, SI, S2 трехразрядным двоичным кодом.
Двоичный код, управляющий работой мультиплексора, формируется на выходах
двоичного счетчика 7. Тактовые импульсы поступают на счетчик с
передающего выхода микропроцессора ТХД, т.е. на счетный вход счетчика
последовательно подаются опросные импульсы. По окончании цикла опроса
счетчик (в блоке 7 их два для подсчета всего количества импульсов в
цикле опроса) сбрасывается в исходное состояние.
Рассмотрим последовательность действия блока в момент включения лифта.
После включения прежде всего в микропроцессор 3 вводится число,
определяющее этажность здания. Код этажности набирается на отдельном
мультиплексоре (на схеме не показан), на выводах которого при установке
лифта набирается нужный двоичный код. Микропроцессор поочередно
подключает выводы этого мультиплексора к своему входу INTO, который
используется в данной схеме не как вход внешних прерываний, а как вход,
предназначенный только для опроса количества этажей в здании.
После определения количества этажей лифт совершает калибровочный рейс на
первый этаж при первом нажатии на любую кнопку вызова или приказа (если
лифт не находится на первом этаже).
Если, например, при стоящей на первом этаже свободной кабине поступает
вызов с первого этажа, то этот сигнал через мультиплексор 2 поступает на
вход микропроцессора RXD - стандартный вход приемника сигналов.
Микропроцессор сопоставляет события, а именно то, что на запрос о
состоянии вызывной кнопки первого этажа пришел импульс от этой кнопки,
свидетельствующий о наличии вызова, и формирует на порте РО адрес, по
которому из запоминающего устройства 4 поступают команды о дальнейших
действиях, выявляется совпадение этажа вызова с этажом положения кабины,
и на выходе RD микропроцессора формируется сигнал (в данной схеме выходы
WR и RD используются как одиночные разряды порта, служащие для включения
реле управления вверх и вниз, а также реле открывания дверей), который
после усиления поступает на выход «откр. дверей».
Предположим, что пассажир вошел в кабину и нажал кнопку приказа пятого
этажа. В цикле опроса за кнопки вызова и приказа пятого этажа отвечает в
данном случае 13-й импульс. При появлении на выходе ТХД микропроцессора
13-го по счету импульса он попадает на счетный вход счетчика 7, двоичный
код на выходе которого включает канал мультиплексора 2, на входе
которого подключен сигнал от кнопки приказа пятого этажа, и с выхода
мультиплексора этот сигнал поступает
на вход RXD приемника сигналов микропроцессора.
Далее, как описано выше, микропроцессор обрабатывает этот сигнал и
формирует сигнал на выходе WR, который после усиления поступает на выход
«вверх» и обеспечивает включение реле управления вверх в релейной части
схемы. При движении вверх счет этажей осуществляется по датчикам
замедления вверх. По прибытии на этаж назначения и выходе всех
пассажиров из кабины в блок электронного селектора подается сигнал
«Сброс», по которому снимаются сформированные ранее сигналы управления,
и лифт готов к движению по вызову или приказу. При движении кабины лифта
микропроцессор при помощи мультиплексоров непрерывно опрашивает датчики
замедления вверх и вниз, датчик точной остановки, датчики крайних
этажей,
кнопки вызовов и приказов. Информация, поступающая от этих устройств,
обрабатывается микропроцессором, который в соответствии с записанной в
запоминающем устройстве программой формирует требуемые сигналы
управления.
Описанное устройство формирует с помощью микропроцессора только три
сигнала управления. Остальные задачи управления решаются с помощью
релейно-контактной схемы. Такое решение нашло применение в отечественной
практике, в основном при модернизации лифтов. В большинстве современных
лифтов (как зарубежных, так и в отечественных) программными средствами
решаются практически все основные функции управления.
На рис. 12.58 приведена блок-схема программы управления лифтом в режиме
«Нормальная работа». При закрытых дверях с помощью программы, записанной
в запоминающем устройстве, осуществляется опрос постов вызова, и при
появлении вызова, проверяется условие нахождения кабины лифты на том же
этаже вызова. Если это условие не выполняется, то осуществляется переход
к программному блоку «Выбор направления», а при его выполнении
формируется сигнал «Открыть дверь». После открывания дверей по
завершении выдержки времени или при поступлении сигнала приказа
обеспечивается закрывание дверей, решается задача выбора направления
движения с учетом взаим-ного положения этажа назначения и этажа
исходного положения кабины. В соответствии с результатами этого выбора
включается привод для движения кабины в нужном направлении. В процессе
движения кабины осуществляется проверка условия совпадения положения
кабины с этажом назначения. При выполнении этого условия формируется
сигнал замедления и остановки кабины, открываются двери, дальше
управление осуществляется аналогично описанному.
Аналогичные программы формируются для обеспечения работы лифта в других
режимах (с учетом особенностей работы в этих режимах). Правда,
управление в «Режиме ревизии» обычно выполняют без участия
микропроцессорной системы для обеспечения большей безопасности (алгоритм
управления в этом режиме достаточно прост, а возможность управления с
крыши кабины не должна зависеть от работоспособности микропроцессорной
системы). При использовании режима группового управления вводят
дополнительные программные блоки, выполнение которых зависит от
принятого при этом алгоритма управления.
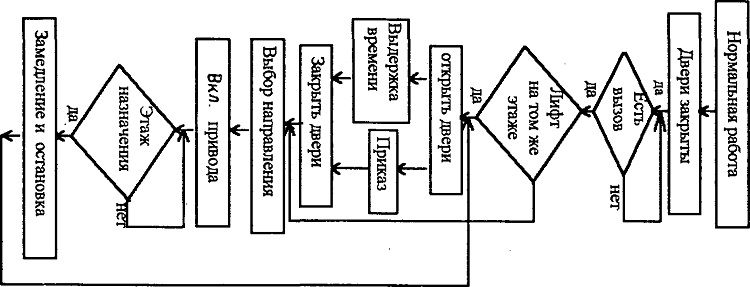
Рис. 12.58. Упрощенная блок-схема программы управления лифтом в режиме «Нормальная работа»
Содержание
- 1. Лифты (Волков Д. П.) - онлайн
- 2. Предисловие (лифты)
- 3. История развития лифтостроения
- 4. Современное состояние, тенденции и перспективы развития лифтостроения
- 5. Общие положения и определения классификации лифтов
- 6. Классификация лифтов
- 7. Кинематические схемы лифтов
- 8. Техническая характеристика лифтов
- 9. Общие требования к конструкции и параметрам лифтов
- 10. Устройство, компоновка и взаимодействие узлов лифта
- 11. ОСНОВЫ ПРОЕКТИРОВАНИЯ ВЕРТИКАЛЬНОГО ТРАНСПОРТА (ЛИФТОВ) ЗДАНИЙ ИСООРУЖЕНИЙ
- 12. Расчет производительности и необходимого числа лифтов
- 13. Размещение лифтов в зданиях и сооружениях
- 14. МЕХАНИЗМЫ ПОДЪЕМА ЛИФТОВ
- 15. Сравнительная характеристика лифтовых лебедок различного конструктивногоисполнения
- 16. Сравнительная характеристика лифтовых лебедок различного конструктивногоисполнения
- 17. Сравнительная характеристика лифтовых лебедок различного конструктивногоисполнения
- 18. Канаты и цепи лифтов
- 19. Барабаны, канатоведущие шкивы, блоки и контршкивы лифтов
- 20. Теория работы фрикционной передачи тягового усилия в лифтовых лебедках сКВШ
- 21. Редукторы лифтовых лебедок
- 22. Тормоза лифта
- 23. Тормоза лифта
- 24. Определение массы и уравновешивание подвижных частей МЕХАНИЗМА ПОДЪЕМАлифта
- 25. Расчет механизма подъема лифта
- 26. КАБИНЫ ЛИФТА
- 27. Каркас кабины лифта
- 28. Конструкция пола и устройств контроля загрузки кабины лифта
- 29. Конструкция пола и устройств контроля загрузки кабины лифта
- 30. Канатные подвески лифтов
- 31. Канатные подвески лифтов
- 32. Направляющие башмаки лифтов
- 33. ПРОТИВОВЕСЫ ЛИФТА
- 34. Динамика нагрузки металлоконструкций каркаса в режимах подскока изатягивания противовеса лифта
- 35. ДВЕРИ КАБИНЫ И ШАХТЫ ЛИФТА
- 36. Конструкция и работа механизма привода автоматических дверей лифта
- 37. Раздвижные двери кабины лифта
- 38. Конструкция и работа механизма привода автоматических дверей лифта
- 39. Кинематика и расчет механизма привода автоматических раздвижных дверейлифта
- 40. Кинематика и расчет механизма привода автоматических раздвижных дверейлифта
- 41. Кривошипно-шатунный (рычажный) механизм привода автоматических дверейлифта
- 42. Кинематика и расчет механизма привода автоматических раздвижных дверейлифта
- 43. ЛИФТОВЫЕ НАПРАВЛЯЮЩИЕ
- 44. Конструкция и установка направляющих в шахте лифта
- 45. ЛИФТОВЫЕ ЛОВИТЕЛИ
- 46. Классификация лифтовых ловителей
- 47. Лифтовые улавливающие устройства их основные характеристики
- 48. Механизм привода лифтовых ловителей
- 49. Механизм привода лифтовых ловителей
- 50. Конструкция, устройство и принцип действия лифтовых ловителей
- 51. Конструкция, устройство и принцип действия лифтовых ловителей
- 52. Расчет лифтовых ловителей
- 53. ЛИФТОВЫЕ ОГРАНИЧИТЕЛЬ СКОРОСТИ
- 54. Классификация лифтовых ограничителей скорости
- 55. Конструкция и расчет лифтового ограничителя скорости центробежного типа СГОРИЗОНТАЛЬНОЙ ОСЬЮ ВРАЩЕНИЯ
- 56. Конструкция и расчет ограничителя скорости с вертикальной осью вращения
- 57. ЛИФТОВЫЕ УПОРЫ И БУФЕРЫ
- 58. Конструкция и расчет лифтового пружинного буфера
- 59. Конструкция и расчет лифтового гидравлического буфера
- 60. ШАХТЫ, МАШИННЫЕ И БЛОЧНЫЕ ПОМЕЩЕНИЯ
- 61. Лифтовые машинные и блочные помещения
- 62. ЭЛЕКТРОПРИВОД И АВТОМАТИКА ЛИФТОВ
- 63. Оптимальная диаграмма движения кабины лифта
- 64. Силы и моменты нагрузки электроприводов лифтов
- 65. Динамические режимы электроприводов лифтов
- 66. Нерегулируемый лифтовый привод с односкоростным и двухскоростнымДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА
- 67. Регулируемый лифтовый привод переменного трехфазного тока
- 68. Регулируемый лифтовый привод переменного трехфазного тока
- 69. Регулируемый лифтовый привод постоянного тока
- 70. Общая характеристика систем управления лифтов
- 71. Лифтовые системы управления с контактной логикой
- 72. Лифтовые системы управления с бесконтактной логикой
- 73. Системы управления лифтами на базе микропроцессорной техники
- 74. МОНТАЖ ЛИФТОВ
- 75. Подготовка и организация монтажных лифтовых работ
- 76. Приемка и подготовка строительной части к монтажу лифта
- 77. Последовательность выполнения операций при монтаже лифта
- 78. Доставка лифтового оборудования к месту монтажа
- 79. Особенности монтажа оборудования при замене и модернизации лифтов
- 80. Определение координат установки оборудования лифта в шахте
- 81. Грузоподъемное и такелажное оборудование для монтажа лифтов
- 82. Механизированный инструмент, применяемый на монтаже лифтов
- 83. МОНТАЖ ЛИФТОВОЙ ШАХТЫ
- 84. Монтаж шахты лифта с металлическим каркасом
- 85. Монтаж лифтовой шахты из тюбингов
- 86. Способы крепления узлов и деталей оборудования лифта к строительнымконструкциям шахты и машинного помещения
- 87. Установка кронштейнов крепления направляющих кабины и противовеса лифта
- 88. Монтаж направляющих кабины и противовеса лифта
- 89. Монтаж направляющих кабины и противовеса лифта
- 90. Монтаж направляющих кабины и противовеса лифта
- 91. Монтаж направляющих кабины и противовеса лифта
- 92. Монтаж дверей шахты лифта
- 93. Монтаж дверей шахты лифта
- 94. Монтаж дверей шахты лифта
- 95. Монтаж дверей шахты лифта
- 96. Монтаж обрамлений дверных проемов лифтов
- 97. Монтаж оборудования приямка лифта
- 98. Монтаж противовеса лифта
- 99. Монтаж кабины лифта
- 100. Монтаж кабины лифта
- 101. Монтаж кабины лифта
- 102. Монтаж кабины лифта
- 103. Монтаж кабины лифта
- 104. Монтаж лифтовых лебедок и отводных блоков
- 105. Монтаж лифтовых лебедок и отводных блоков
- 106. Монтаж ограничителя скорости лифта
- 107. Навеска тяговых канатов лифта
- 108. Монтаж компенсирующих канатов и уравновешивающих цепей лифта
- 109. Монтаж электроаппаратуры лифта
- 110. Монтаж электроаппаратуры лифта
- 111. Монтаж электропроводки и кабелей лифтов
- 112. Монтаж электропроводки и кабелей лифтов
- 113. Монтаж электропроводки и кабелей лифтов
- 114. Монтаж электропроводки и кабелей лифтов
- 115. Монтаж электропроводки и кабелей лифтов
- 116. Устройство заземления (зануления) лифтовой установки
- 117. Замер сопротивления изоляции электрических цепей лифта
- 118. Наладка и сдача лифта в эксплуатацию
- 119. Опробование лифта
- 120. Опробование лифта
- 121. Регулировка оборудования лифта
- 122. Наладка лифтов. Наладочные работы
- 123. Обкатка и сдача лифта в эксплуатацию
- 124. Техника безопасности при монтаже лифтов
- 125. ЭКСПЛУАТАЦИЯ, ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ И РЕМОНТ ЛИФТОВ
- 126. Текущий и технический надзор за работой лифтов
- 127. Работоспособность лифтов
- 128. Структура службы эксплуатации лифтов
- 129. Структура службы эксплуатации лифтов
- 130. Структура службы эксплуатации лифтов
- 131. Приемка лифтового оборудования в эксплуатацию
- 132. Статические и динамические испытания лифтов
- 133. Порядок и содержание работы по проверке уровня технического состояниялифта
- 134. Порядок и содержание работы по проверке уровня технического состояниялифта
- 135. Порядок и содержание работы по проверке уровня технического состояниялифта
- 136. Порядок и содержание работы по проверке уровня технического состояниялифта
- 137. Система мониторинга технического состояния лифтов на основедиспетчеризации
- 138. Периодичность и содержание технического обслуживания иремонтно-профилактических работ
- 139. Периодичность и содержание технического обслуживания иремонтно-профилактических работ
- 140. Периодичность и содержание технического обслуживания иремонтно-профилактических работ
- 141. Полугодовой текущий ремонт ТР-6 пассажирских и грузопассажирских лифтов савтоматическим приводом дверей
- 142. Аварийный ремонт лифтов
- 143. Капитальный ремонт лифтов
- 144. Модернизация лифтов
- 145. Смазочные материалы и смазка деталей и узлов лифта
- 146. Смазочные материалы и смазка деталей и узлов лифта
- 147. Смазочные материалы и смазка деталей и узлов лифта
- 148. Смазочные материалы и смазка деталей и узлов лифта
- 149. Инструментальные испытания лифтового оборудования
- 150. Методологическая основа инструментальных испытаний лифтов
- 151. Электрические первичные преобразователи лифтов
- 152. Пьезоэлектрические преобразователи лифтов
- 153. Резисторные преобразователи лифта
- 154. Монтаж тензорезисторов лифта
- 155. Импульсные преобразователи лифта
- 156. Лифтовые измерительные цепи
- 157. Лифтовая мостовая измерительная цепь
- 158. Лифтовые измерительные цепи
- 159. Лифтовые регистрирующие устройства
- 160. Лифтовые самопишущие приборы
- 161. Лифтовые светолучевые осциллографы
- 162. Магнитографы лифтовые
- 163. Функциональные (заводские) испытания лифтов
- 164. Испытания узлов лифта
- 165. Сертификационные испытания лифта
- 166. Диагностирование лифтов
- 167. Прогнозирование остаточного ресурса лифтов
- 168. КАЧЕСТВО И СЕРТИФИКАЦИЯ ЛИФТОВ
- 169. Показатели качества лифтов
- 170. Надежность лифтов
- 171. Динамика, вибрации и шум лифтов
- 172. Оценка основных частот колебаний лифтов
- 173. Вынужденные колебания лифтов
- 174. Оценка долговечности и сроков службы лифтов
- 175. Оценка долговечности элементов лифта по износу
- 176. Оценка долговечности деталей лифта по износу
- 177. Системы качества и сертификации лифтов
- 178. Сертификация лифтов
- 179. ЛИТЕРАТУРА (лифты)
- 180. МОСКОВСКОЕ ГОСУДАРСТВЕННОЕ УНИТАРНОЕ ПРЕДПРИЯТИЕ МОСЛИФ
- 181. АКЦИОНЕРНАЯ КОМПАНИЯ ЗАКРЫТОГО ТИПА РУСЬЛИФТ
- 182. Открытое акционерное общество Карачаровский механический завод
- 183. ОТКРЫТОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО ЩЕРБИНСКИЙ ЛИФТОСТРОИТЕЛЬНЫЙ ЗАВОД
- 184. АКЦИОНЕРНАЯ КОМПАНИЯ МОСЛИФТМОНТАЖ
- 185. РОССИЙСКАЯ ФЕДЕРАЦИЯ ООО ПРЕДПРИЯТИЕ ИНЖЕНЕРНЫЙ ЦЕНТР КОЛИС
- 186. ИНЖЕНЕРНЫЙ ЦЕНТР ПО НЕЗАВИСИМОЙ ТЕХНИЧЕСКОЙ ЭКСПЕРТИЗЕ ЭСКАЛАТОРОВ ИЛИФТОВ
- 187. Предприятие ПОДЪЕМ Р О D Y О М
- 188. НАУЧНО-ПРОИЗВОДСТВЕННАЯ ФИРМА ЛИФТМОНТАЖ
- 189. Народная фирма Электропровод
- 190. ИКЦ ИНЖТЕХЛИФТ
- 191. СОДЕРЖАНИЕ Лифты (Волков Д. П.)

от 1030.00 руб./шт.

от 224.00 руб./шт.

от 195.00 руб./шт.

от 195.00 руб./шт.

от 402.00 руб./шт.

от 402.00 руб./шт.

от 288.00 руб./шт.

от 288.00 руб./шт.

от 288.00 руб./шт.

от 56.00 руб./шт.

от 224.00 руб./шт.

от 138.00 руб./шт.